

Series-parallel-connection force-feedback remote-control manipulator
A remote operation and parallel technology, applied in the field of surgical operators and series-parallel force feedback shaking operators, can solve the problems of the series-type main hand structure without clamping freedom, small working space, and large rotation angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
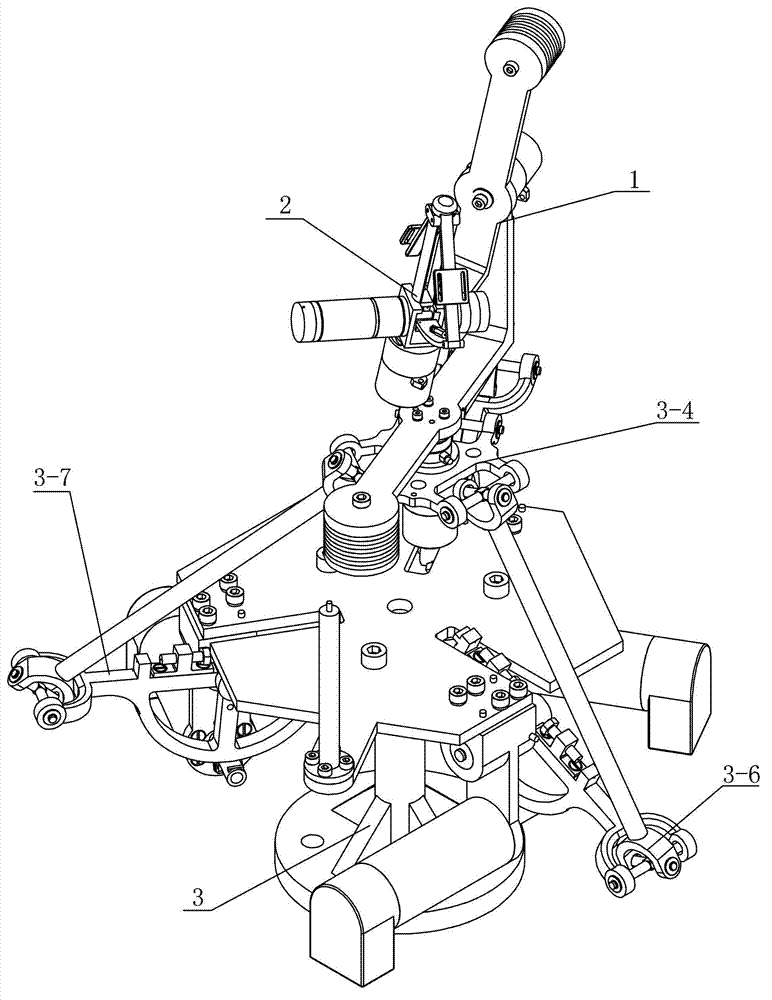
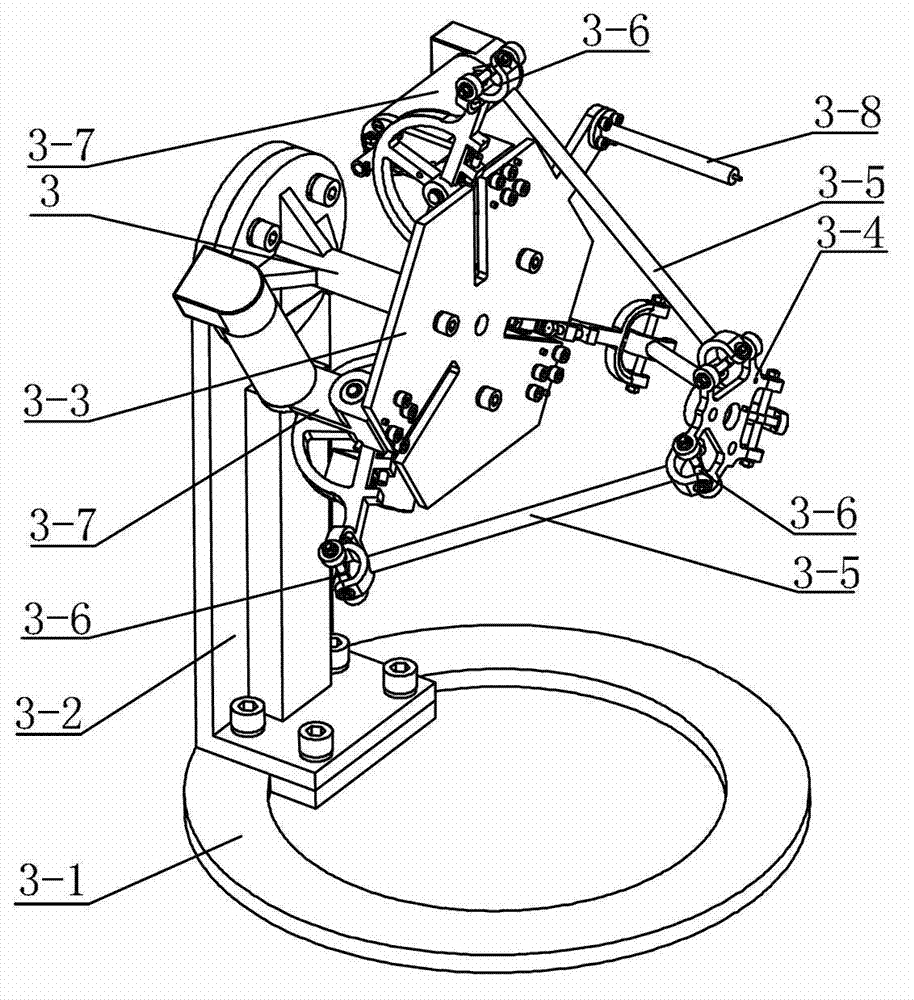
[0020] Specific implementation mode one: combine Figure 1-Figure 5 Describe this embodiment, a series-parallel force feedback remote operation hand of this embodiment includes a series mechanism 1, a parallel mechanism 2 and a clamping mechanism 3;
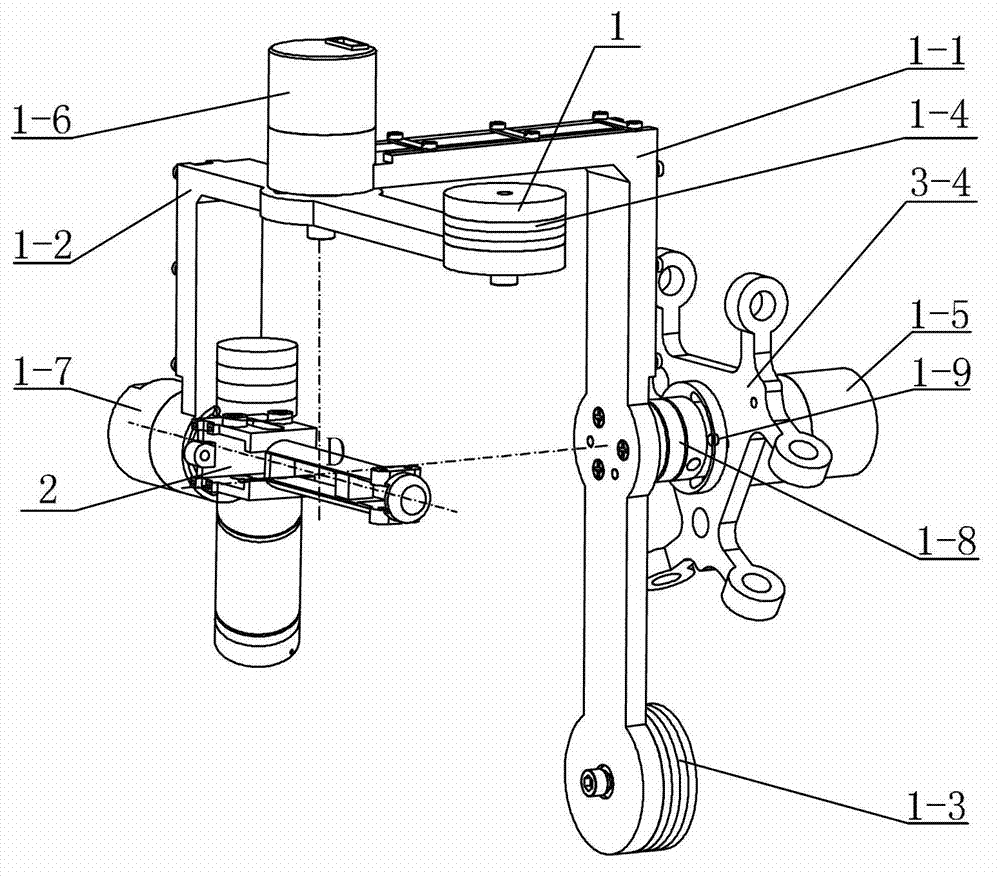
[0021] The series mechanism 1 includes a first rotating arm 1-1, a second rotating arm 1-2, a first counterweight 1-3, a second counterweight 1-4, a first encoder 1-5, a second Encoder 1-6, the third encoder 1-7 and force sensor 1-8, the first rotating arm 1-1 is a rectangular arm, the second rotating arm 1-2 is a rectangular arm, the first rotating arm 1- One end of 1 is rotationally connected with one end of the second rotating arm 1-2, the end of one end of the first rotating arm 1-1 is provided with a second encoder 1-6, and the end of the other end of the first rotating arm 1-1 The first counterweight 1-3 is arranged on the upper part, and the same side of the middle part of the other end of the first rotating arm 1-1 is ar...
specific Embodiment approach 2
[0025] Specific implementation mode two: combination Image 6 Describe this embodiment, the operator described in this embodiment also includes a control device, and the control device includes an industrial computer 6, a motion control card 7, a first servo controller 5 and three second servo controllers 4, and the motion control card The signal output terminal of 7 is connected with the signal input terminal of industrial computer 6, the position signal output terminal of the first servo controller 5 and the position signal output terminals of three second servo controllers 4 correspond to the signal of the motion control card 7 one by one The input end is connected, the electric signal output end of the first servo controller 5 is connected with the electric signal input end of the first servo motor 2-5, the electric signal output end of three second servo controllers 4 is connected with three second servo motors The electrical signal input ends of 3-7-3 are connected one b...
specific Embodiment approach 3
[0026] Specific implementation mode three: combination image 3 To describe this embodiment, the first encoder 1-5, the second encoder 1-6 and the third encoder 1-7 in this embodiment are all incremental encoders. With this setting, the resolution is high and the measurement effect is good. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More