

Microminiature unmanned aerial vehicle longitudinal control method with random delay of distributed network
An unmanned aerial vehicle and random delay technology, applied in the field of flight control, can solve the problems of high communication quality requirements, poor robustness, and the requirement to reduce the update rate of the formation wireless data link, etc., to relax the control range, good compatibility, and convenience The effect of engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
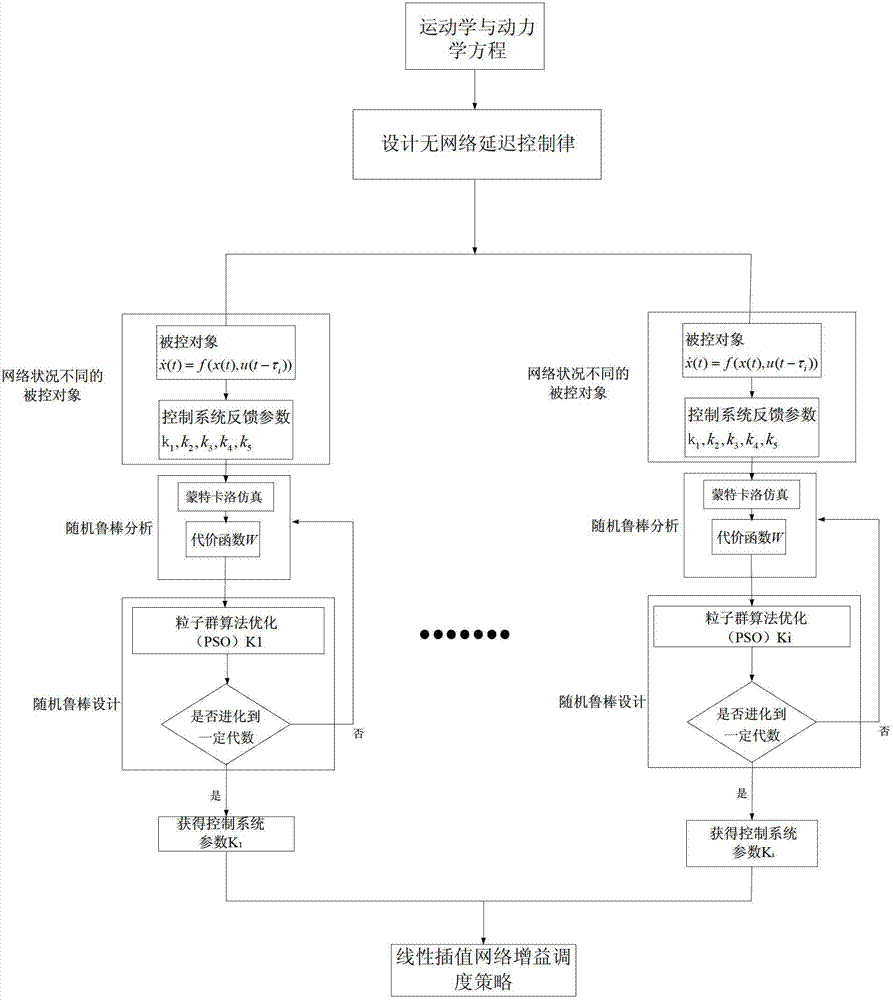
[0087] Step 1: Model the UAV system and determine the control laws of the flight control system without network delay;
[0088] The dynamic parameters and physical parameters of the unmanned aerial vehicle can be obtained according to the actual wind tunnel blowing, using the Anglo-American coordinate system, and the specific values are shown in the table below:
[0089]
[0090] (2) Establish nonlinear six-degree-of-freedom dynamics and kinematic equations;
[0091] The flight state vector of the UAV is selected as:
[0092] X - ( t ) = V α q θ x h m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More