

Garbage classification robot and garbage identification and classification method
A technology of garbage sorting and sorting methods, which is applied in sorting, manipulators, manufacturing tools, etc. It can solve the problems of various image recognition algorithms, rigidity, garbage sorting errors, etc., and achieve the effect of high technical content, making up for errors, and avoiding slow recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
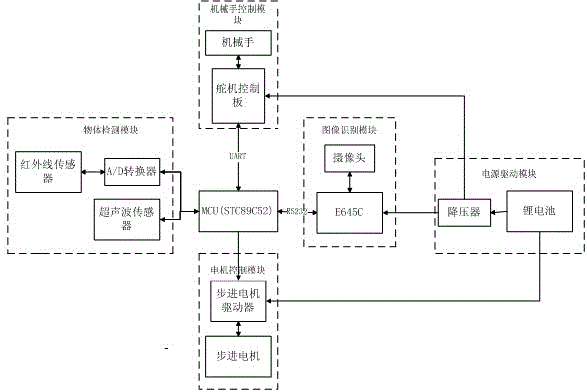
[0027] The invention provides a garbage sorting robot including a manipulator, a trolley chassis, two driving wheels, two universal wheels, processing platform equipment, ultrasonic infrared sensors, lithium batteries and a garbage bin. The trolley can be divided into two layers. The manipulator is placed at the front of the bottom of the trolley to connect with the film, the dustbin is placed in the middle of the chassis, the intelligent processing platform is placed at the rear of the upper trolley, the lithium battery is placed at the back of the bottom of the trolley, and the infrared sensor is installed on the manipulator. , the ultrasonic sensor is installed at the front end of the trolley. The robot can automatically find and identify garbage, and use the manipulator to grab it. It can sort plastic, paper, and cans into three types of garbage.
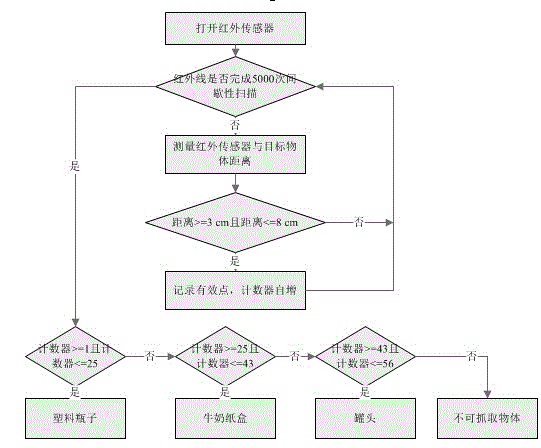
[0028] Such as figure 1 , figure 2 As shown, after the system is powered on and initialized, the lower computer asks the up...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More