

Plane interaction system and method based on binocular vision recognition
A technology of binocular visual recognition and interactive system, applied in the field of plane touch control system, can solve the problems of high-speed real-time spatial coordinate tracking of difficult targets, target recognition errors, errors prone to binocular visual recognition, etc., and achieves high installation flexibility, Cost reduction and portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Embodiments of the present invention will be described below with reference to the accompanying drawings.
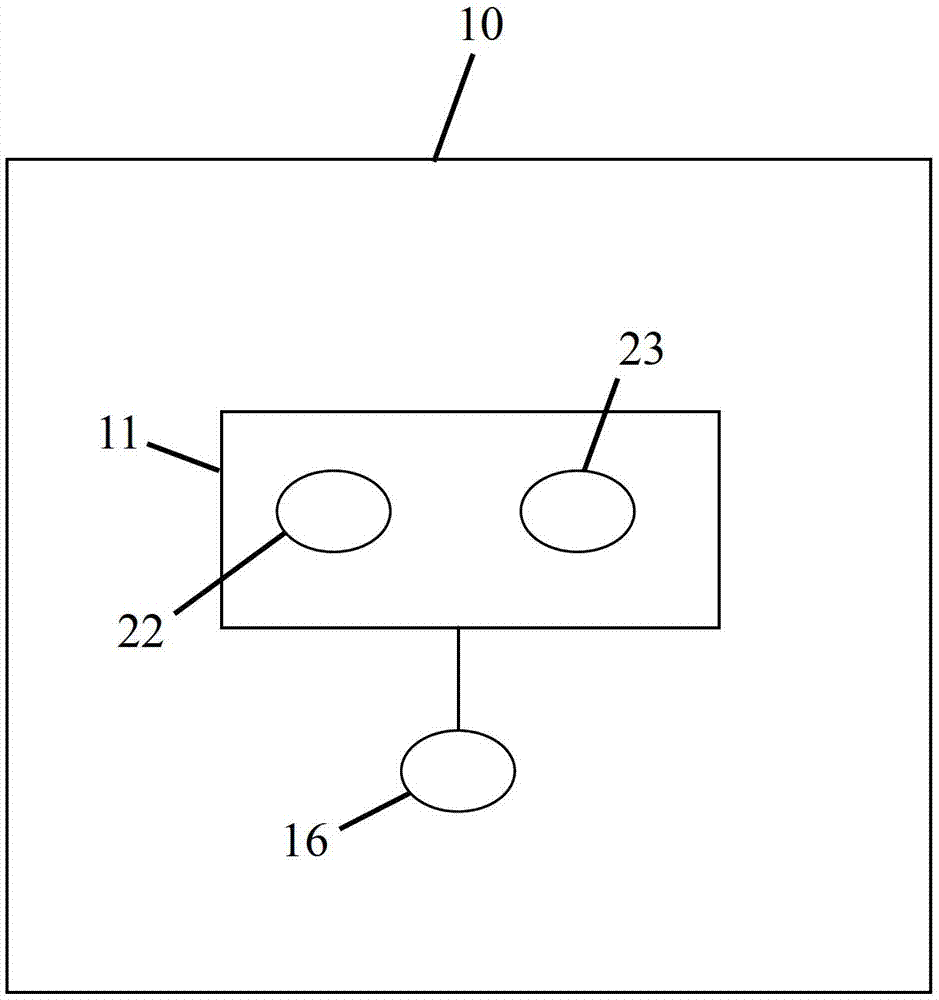
[0019] Figure 1A is a schematic diagram of a plane interaction system 10 based on binocular visual recognition according to an embodiment of the present invention.
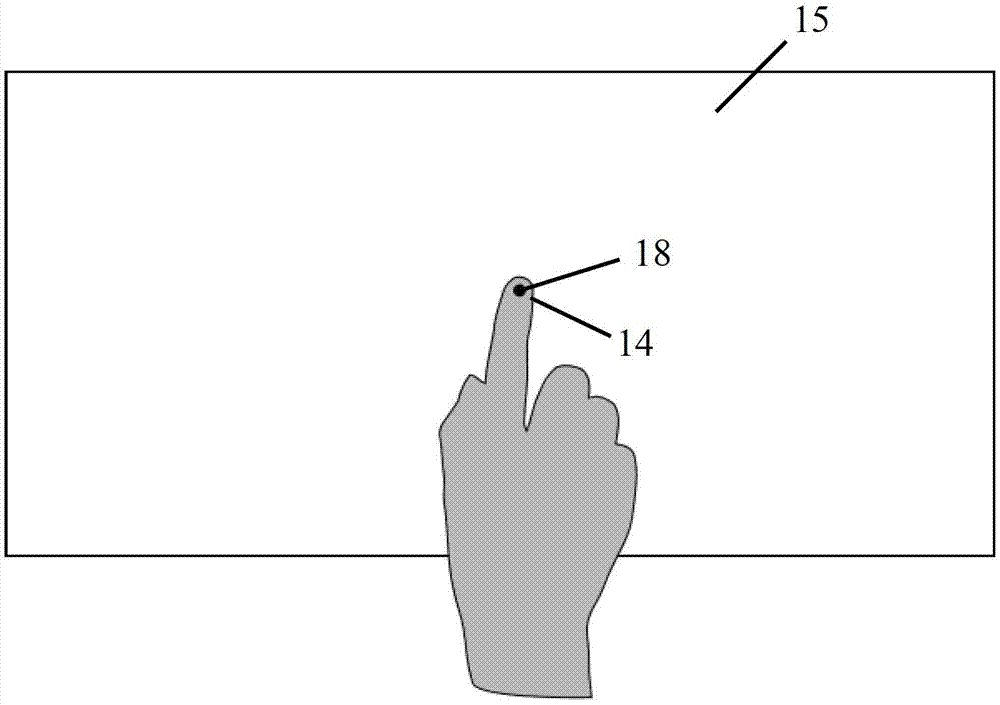
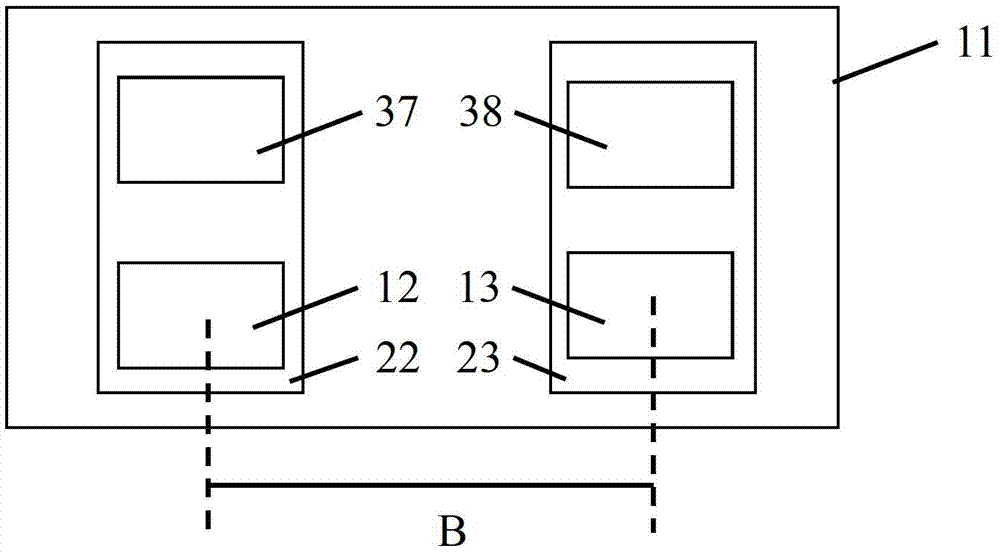
[0020] System 10 includes imaging device 11 and processor 16 . The imaging device 11 includes two imaging assemblies 22 and 23, and the imaging assemblies 22 and 23 are respectively for such as Figure 1B The objects 14 on the interaction plane 15 are shown simultaneously with successive image captures. The interaction plane 15 is defined by three points that are not collinear in space. The design requirements of the imaging device 11 will be referred to below figure 2 to describe.
[0021] The processor 16 processes the image information from the imaging device 11 , performs matching calculation on the images from the imaging components 22 and 23 at the same time, and derives an interactive res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More