Off-line visual programming method and system for robot
An off-line programming and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems affecting work efficiency, clean room pollution, robot arm collision, etc., achieving a high degree of automation and avoiding pollution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
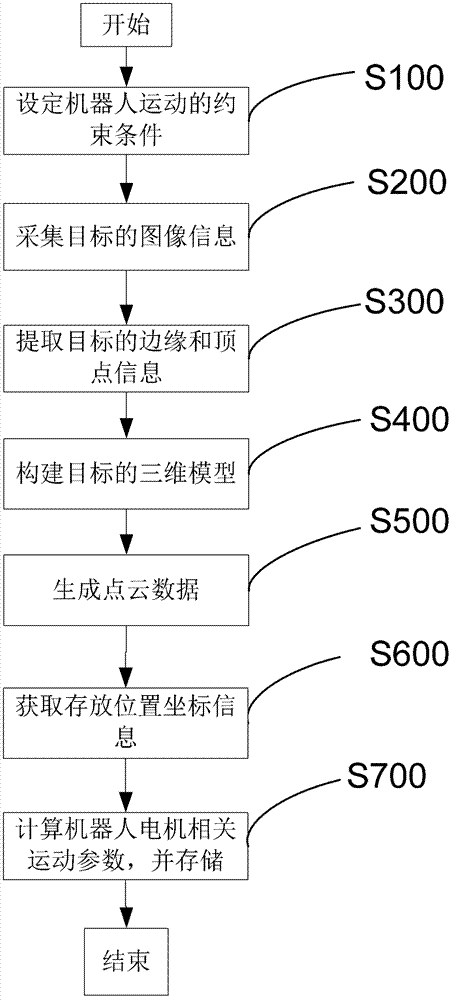
[0045] see figure 1 , a kind of visual robot off-line programming method provided by the present invention, comprises the following steps:
[0046] S100: setting the rotation angle of each axis of the robot as a constraint condition for movement;
[0047] S200: Using a camera to collect target images;
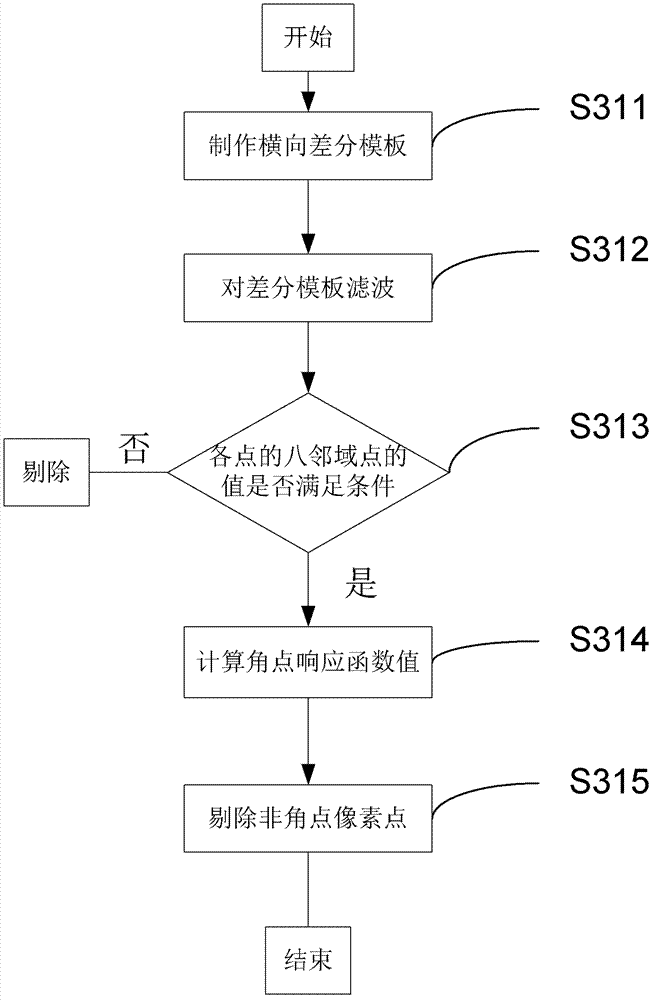
[0048] S300: Using the collected image, extracting edge and vertex information of the target;
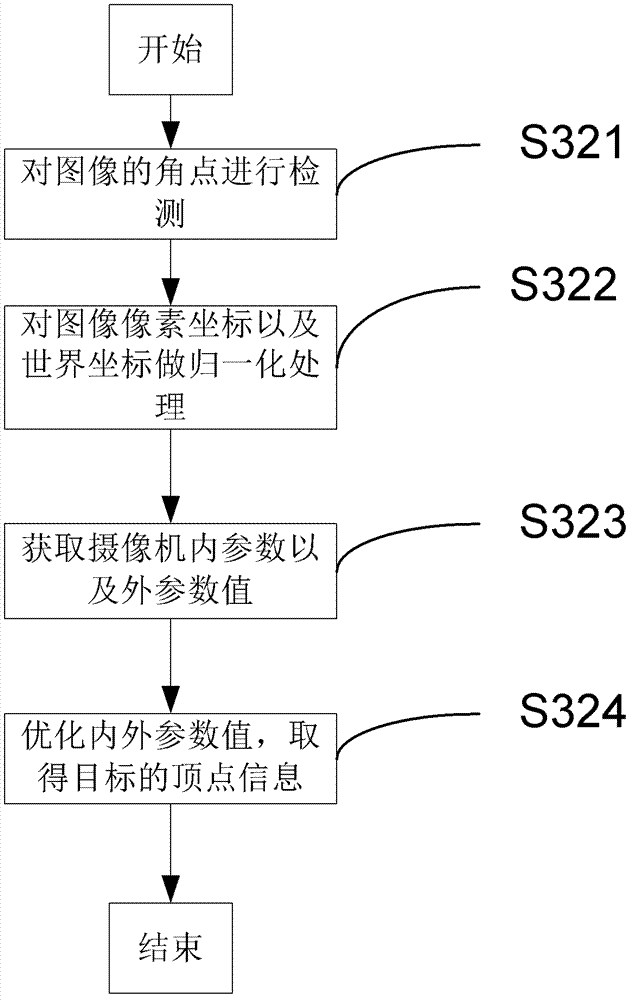
[0049] S400: constructing a three-dimensional model of the target by applying edge and vertex information of the target;
[0050] S500: Applying the 3D model of the target to generate point cloud data of the target model;
[0051] S600: The robot obtains the coordinate information of the storage location of the wafer;
[0052] S700: Calculate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com