

Front lamp following turning control method based on machine vision
A control method and follow-up steering technology, applied in optical signals, signaling devices, transportation and packaging, etc., can solve the problems of control lag, low intelligence, no initiative, etc., to increase the lighting area and expand the road lighting area. , Reduce the effect of lighting blind spot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
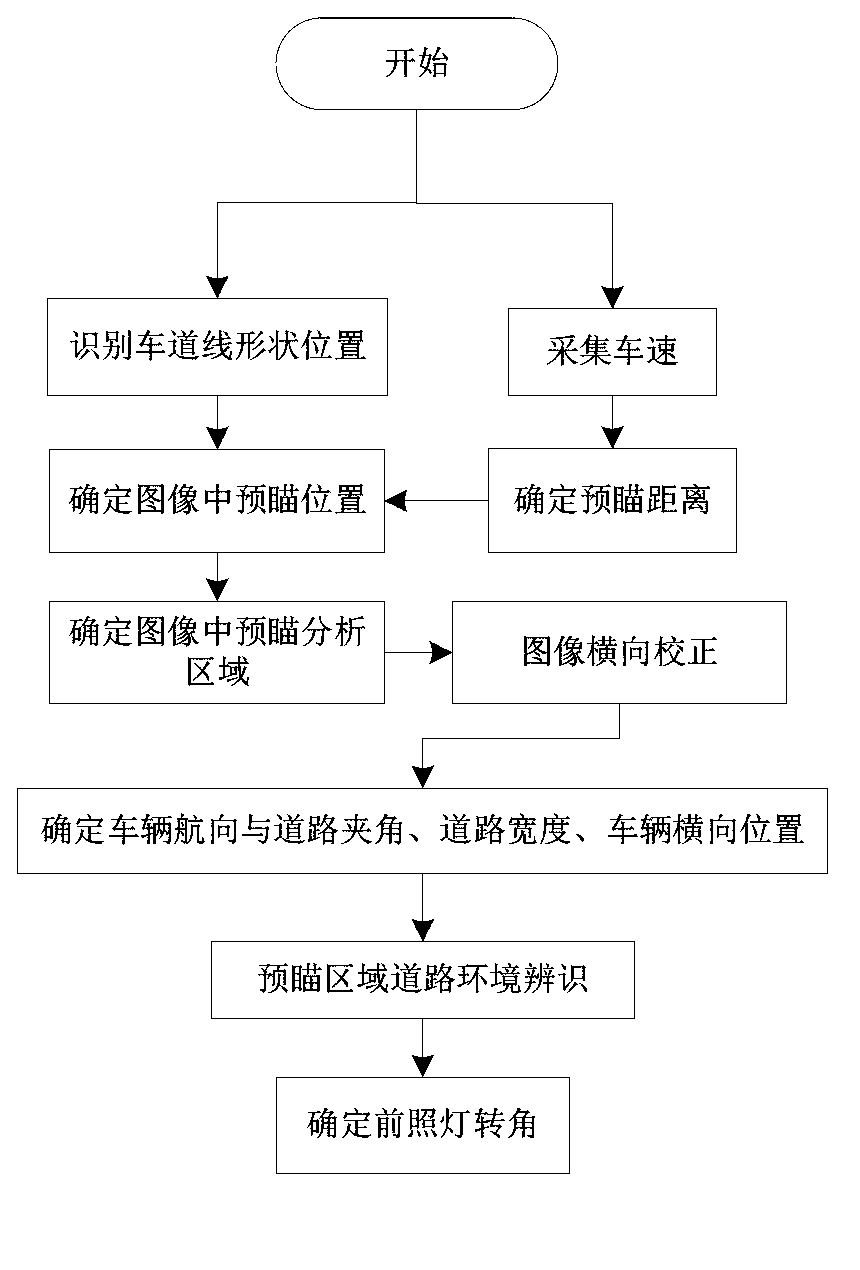
[0048] In the present invention, the vehicle-mounted camera is used as the front road sensing device, combined with the vehicle speed, to identify the lane lines in the lighting area within a certain distance, and to control the rotation angle of the left and right headlights according to the shape, position and lighting area of the lane lines in each frame of image, Increased the area of road lighting within the preview distance.
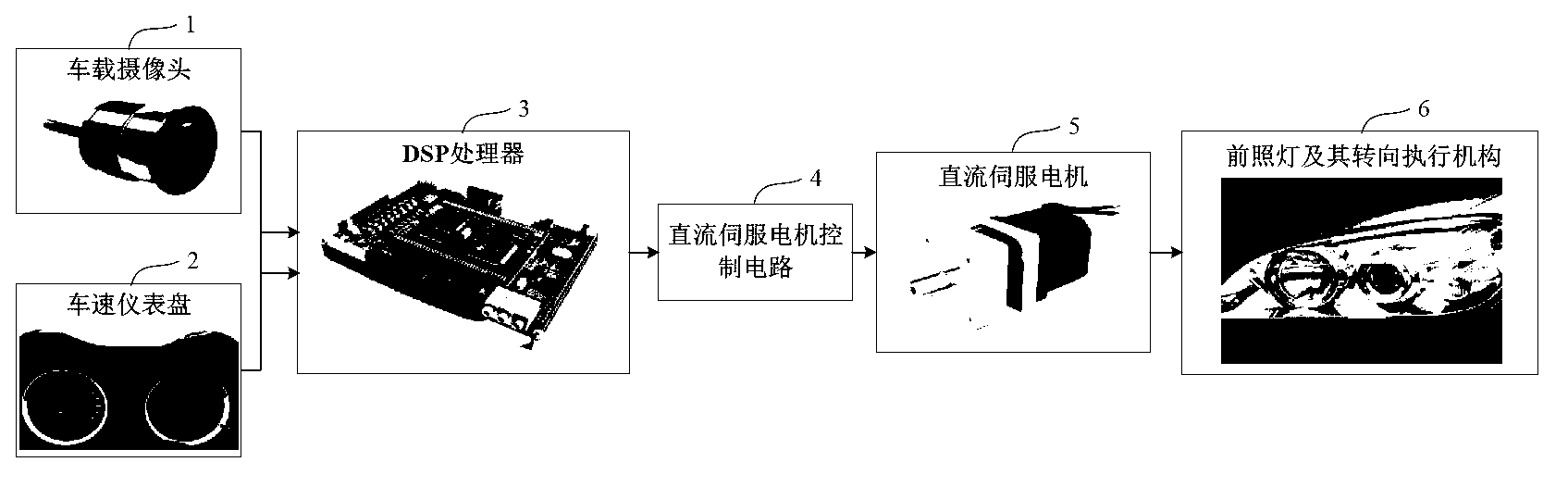
[0049] Such as figure 1 As shown, the physical equipment involved in the headlight follow-up steering method based on machine vision provided by the present invention includes: a vehicle-mounted camera 1, a vehicle speed instrument panel 2, a DSP processor 3, a DC servo motor control circuit 4, and a DC servo motor 5 and the headlight and its steering actuator 6.
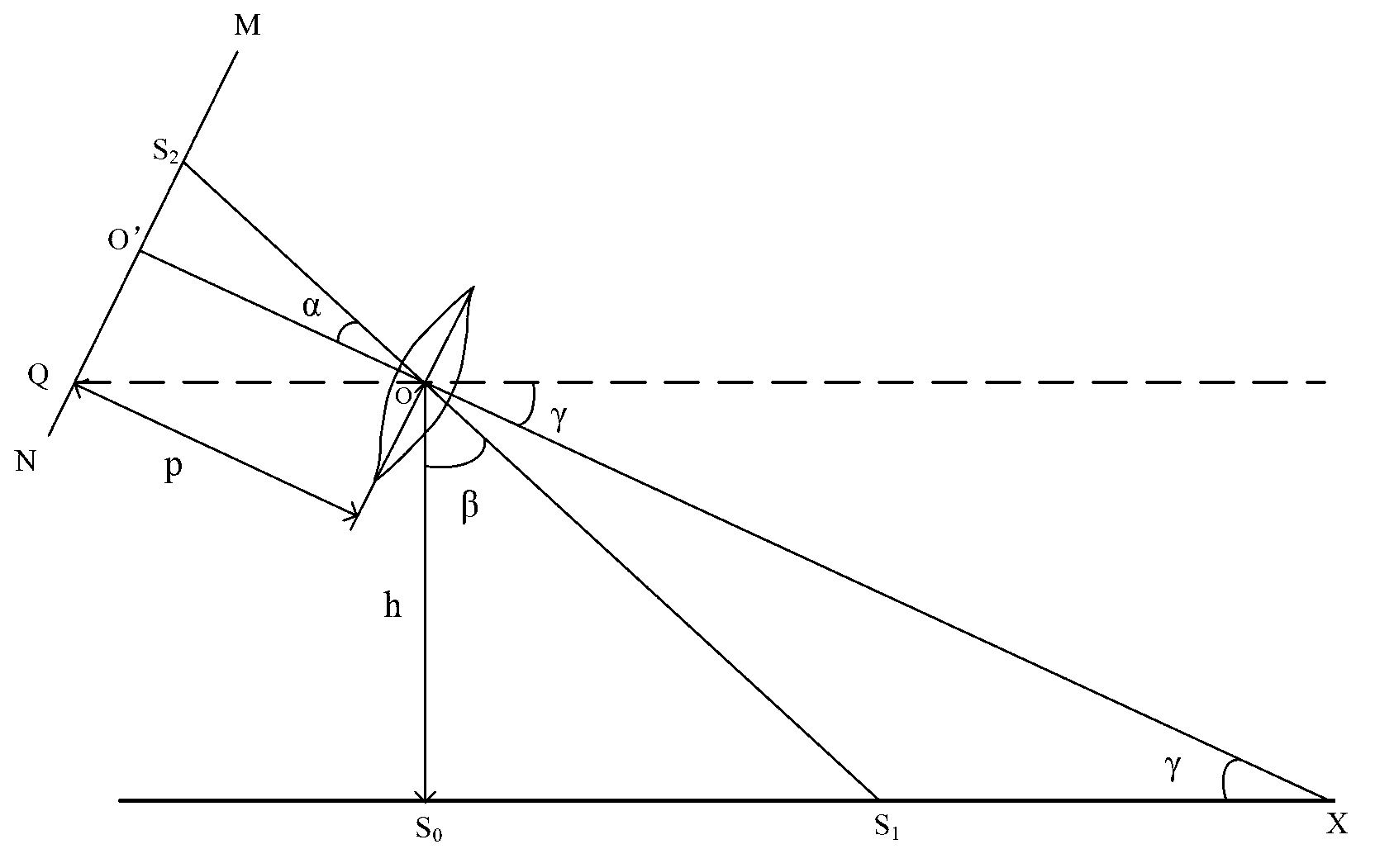
[0050] Let the center distance between the left and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More