

Multi-touch system and method
A multi-touch and camera technology, applied in the field of computer vision, can solve problems such as naturalness, comfort, impact on portability, high requirements for sensing materials, and different impacts on sensing accuracy, so as to achieve diversified operation modes and system response Fast, fast-processing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
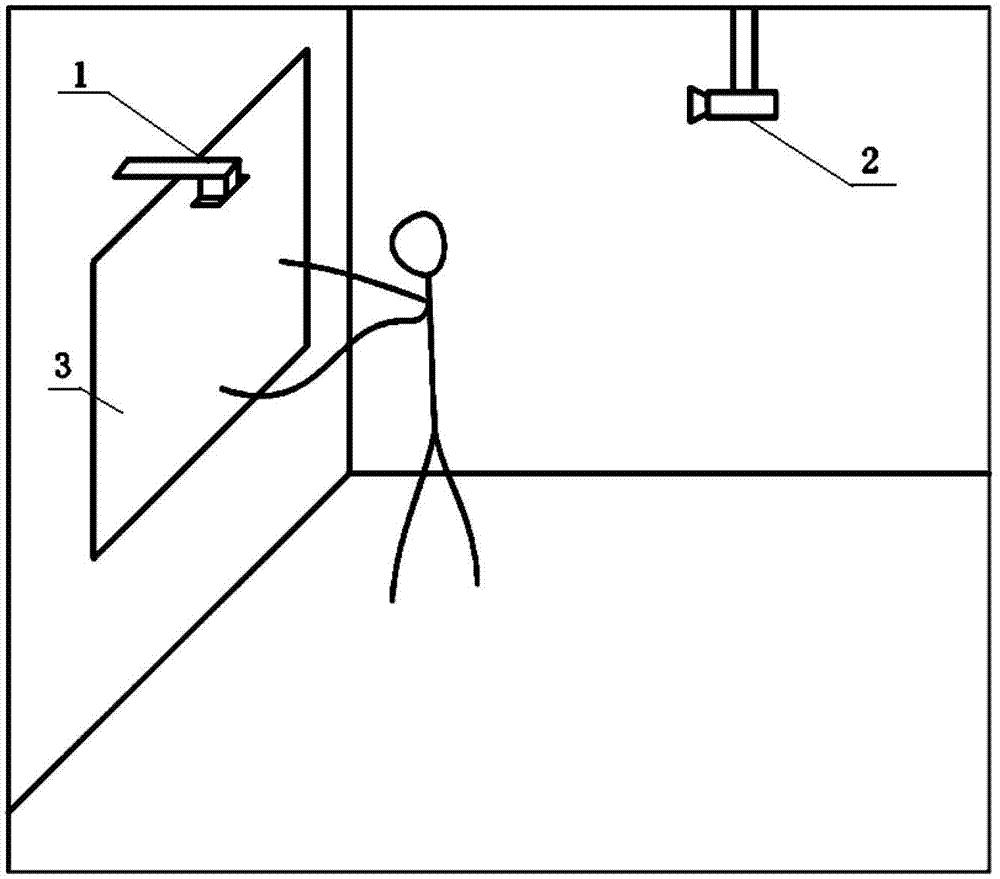
[0038] The present invention provides a multi-touch system based on the Kinect depth camera, and the hardware composition schematic diagram of the whole system is as follows: figure 1 As shown, it includes a Kinect camera 1 , a projection subject 2 and a projection display plane 3 . The computer used to control the entire system is not shown. Kinect is connected to the computer, placed above the operating plane, and the vision is slightly tilted to look down on the entire touch screen. This way of placement is so that the operator's body will not block the kinect's field of vision when performing touch operations. The projector is connected with the computer, and the pla...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More