

Q-function self-adaptation dynamic planning method based on data
A dynamic programming and self-adaptive technology, applied in self-adaptive control, instruments, control/regulation systems, etc., can solve problems such as unfavorable algorithms, redundancy, complex algorithm structure, etc., and achieve the effect of satisfying continuous incentive conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail with reference to the accompanying drawings.
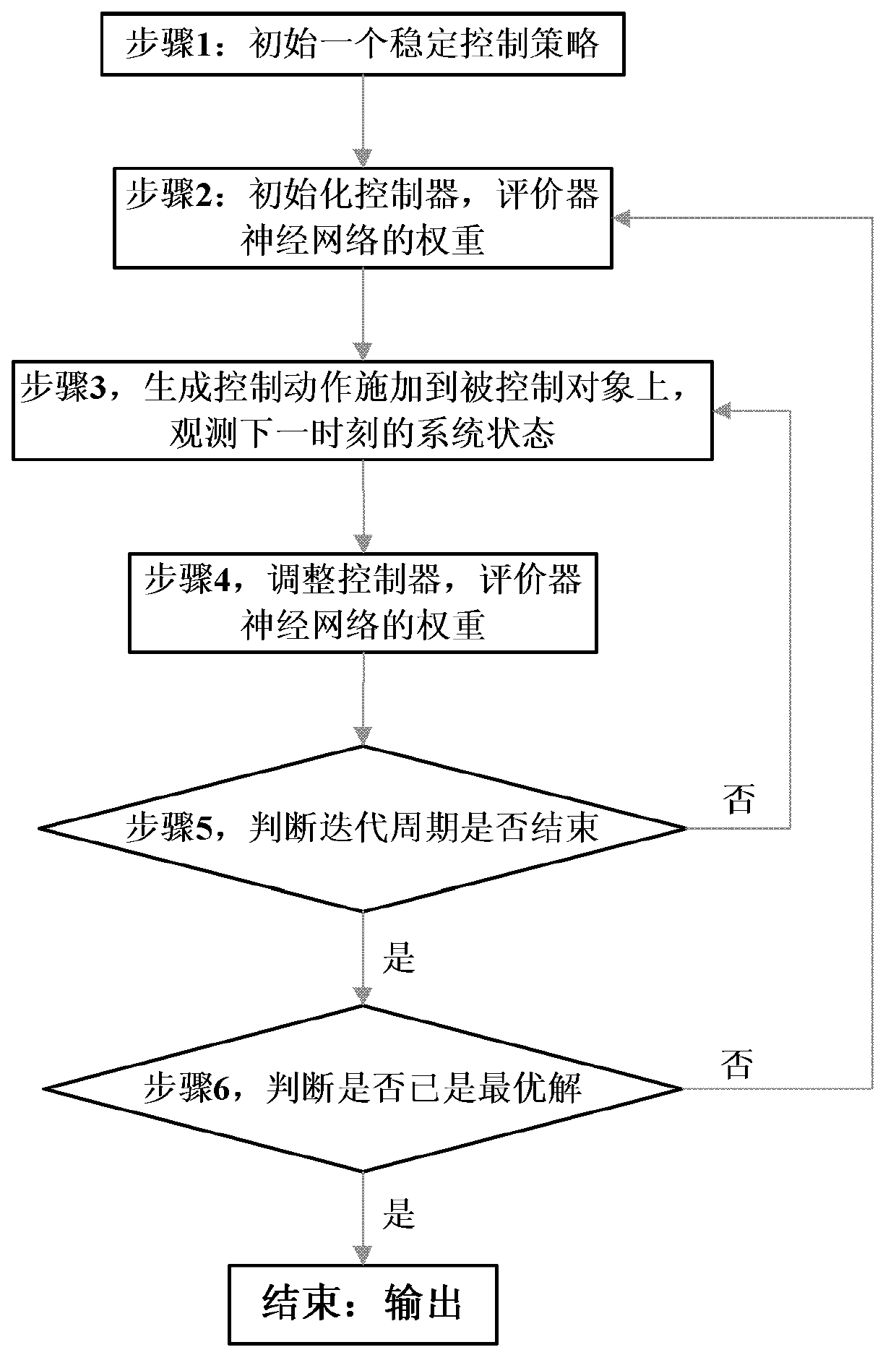
[0028] figure 1 It is an application flowchart of the adaptive dynamic programming method based on Q function.
[0029] Such as figure 1 As shown, the method includes the following steps:
[0030] Step 1, first initialize any stable control strategy, which is required to stably control the controlled system.
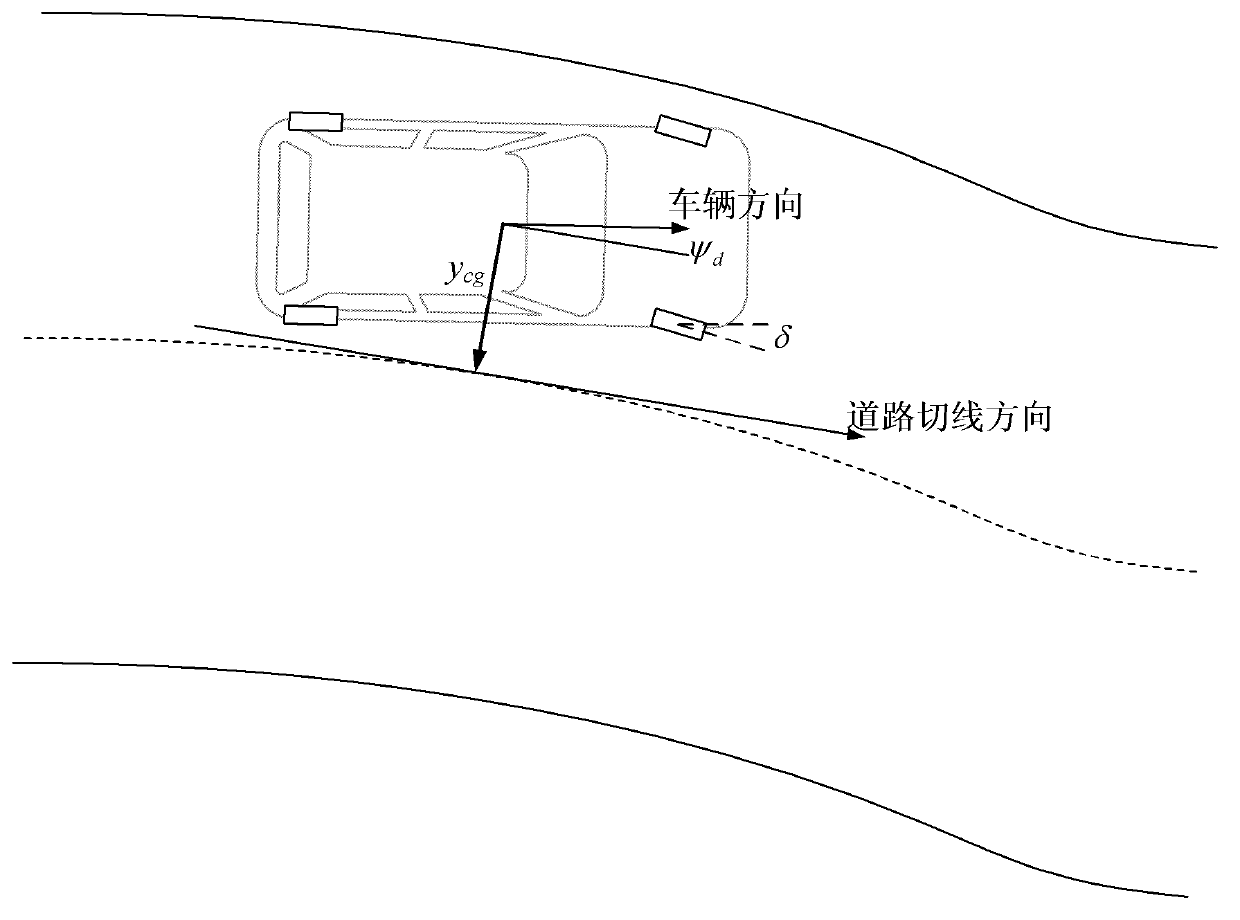
[0031] figure 2 is a schematic diagram of the lane keeping problem. Among them, the lateral offset distance of the center of gravity of the vehicle is y cg Refers to the offset distance from the center of gravity of the vehicle to the lane, and the deflection angle ψ between the vehicle and the lane d It refers to the angle between the direction of the vehicle and the tangent direction of the lane, and δ is the angle of the front wheel. A stable control str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More