

Full-automatic transport robot for physical files
A fully automatic and robotic technology, applied in the field of transportation robots, can solve problems such as manual access to file operation errors, and achieve the effects of low error rate, improved mobility, and zero error rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
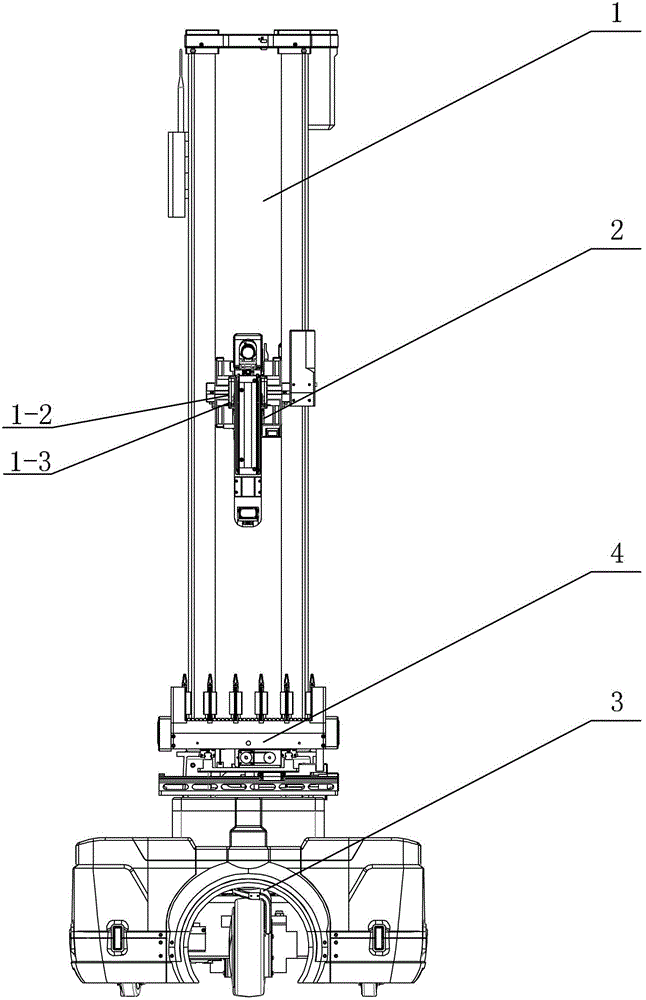
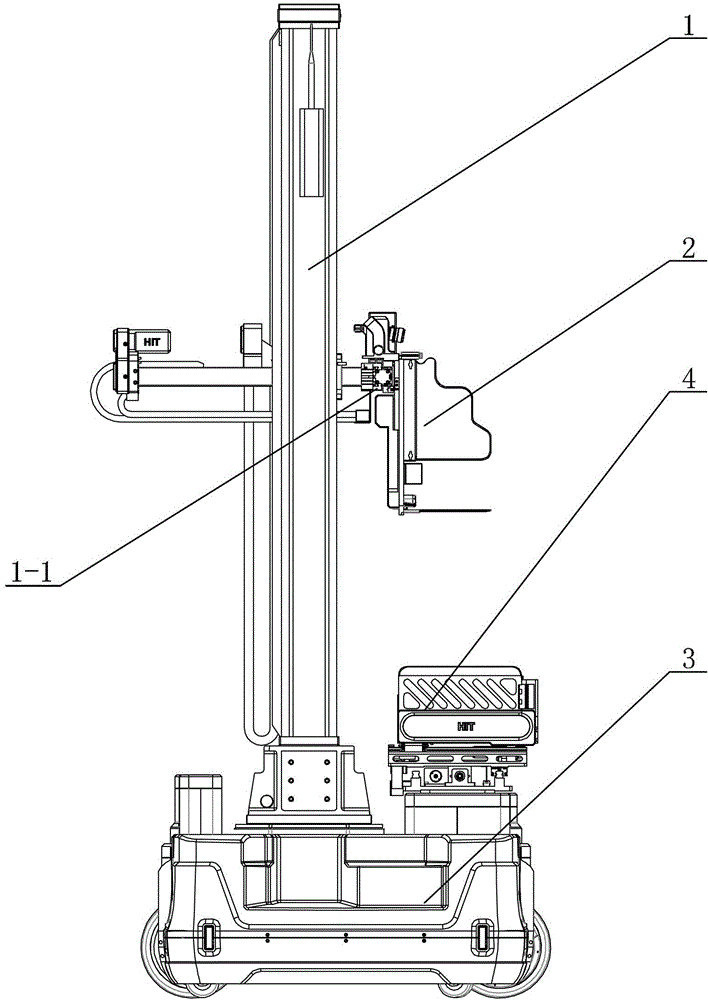
[0007] Specific implementation mode one: combine figure 1 , figure 2 with Figure 9 Describe the present embodiment. A fully automatic transport robot for physical archives described in this embodiment includes a column assembly 1, a gripper assembly 2, a base assembly 3, and a file rack assembly 4. The base assembly 3 includes a base body 5, a rotary mechanism, two Walking and steering mechanism and four auxiliary universal wheels 6, the slewing mechanism is installed in the middle part of the upper surface of the base main body 5, and the four auxiliary universal wheels 6 are evenly arranged on the lower surface of the base main body 5, and the lower surface of the base main body 5 Both sides are respectively provided with a walking and steering mechanism, the column assembly 1 is installed on the slewing mechanism, the claw assembly 2 is installed on the column assembly 1, and the file rack assembly 4 is installed on the upper surface of the base body 5 .
[0008] In thi...
specific Embodiment approach 2
[0009] Specific implementation mode two: combination Figure 9 Describe this embodiment, the slewing mechanism of a kind of physical file automatic transportation robot described in this embodiment includes RV reducer 7, synchronous belt 8 and slewing servo motor 9, the rotating shaft of slewing servo motor 9 is decelerated by synchronous belt 8 and RV Device 7 is connected.
[0010] The beneficial effect of this embodiment is that: the RV speed reducer 7 can achieve a greater speed reduction and torque increase function, while increasing the rotational stiffness.
[0011] Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0012] Specific implementation mode three: combination Figure 9 Describe this embodiment, the walking and steering mechanism of a fully automatic transport robot for physical files described in this embodiment includes a driving wheel 10, a steering servo motor 11, a steering harmonic reducer 12, a walking disc motor 13 and a walking harmonic deceleration Device 14, the rotating shaft of steering servo motor 11 is connected with drive wheel 10 by steering harmonic reducer 12, and the rotating shaft of walking disc motor 13 is connected with the rotating shaft of driving wheel 10 by walking harmonic reducer 14.
[0013] In this embodiment, the driving wheel 10 can realize 360-degree rotation under the drive of the steering servo motor 11, and the left and right driving wheels 10 can be parallel to each other or on a straight line under the driving of the steering servo motor 11, thereby realizing the differential speed operation mode of the robot and the bicycle. Operating mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More