

Layered topological structure based map splicing method for multi-robot system
A layered topology and multi-robot technology, applied in the direction of instruments, image enhancement, image data processing, etc., can solve problems such as splicing errors, achieve the effect of improving accuracy and solving creation efficiency problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
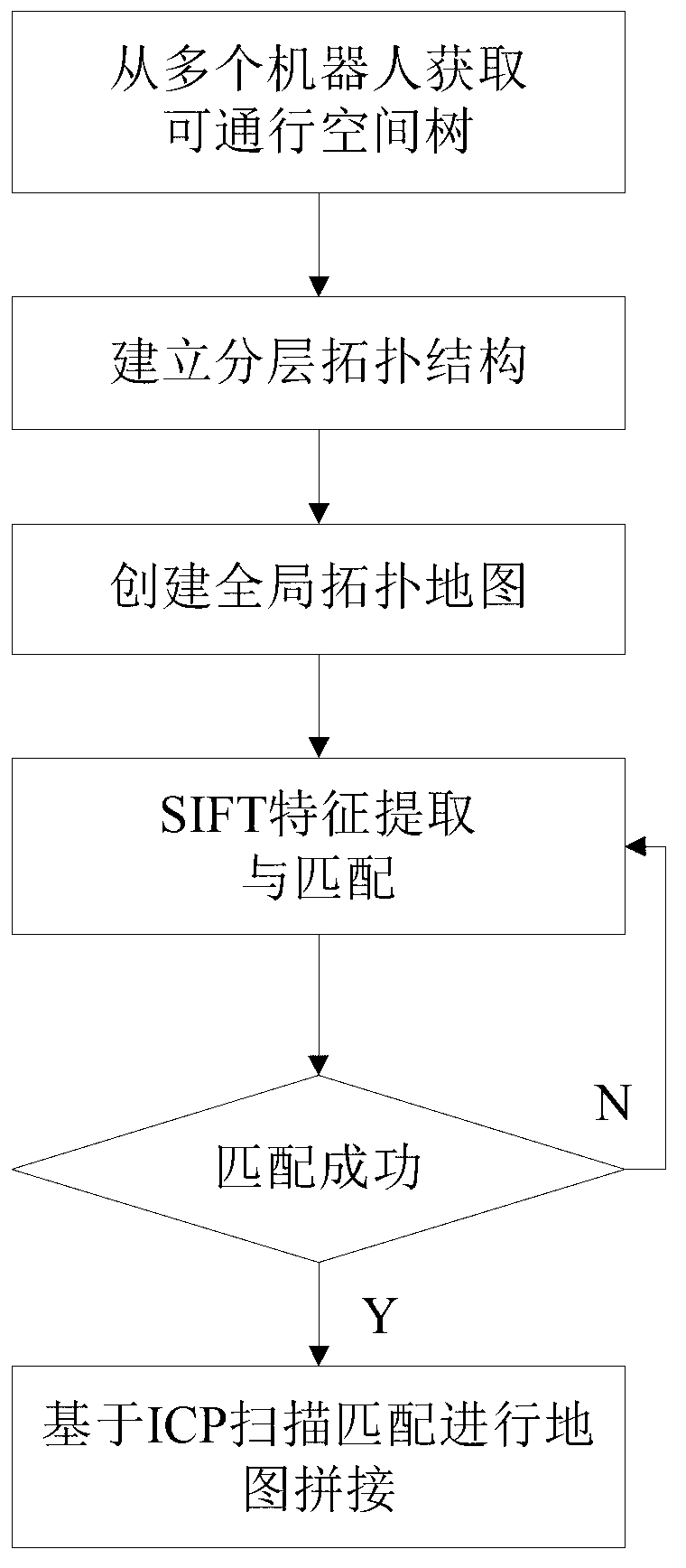
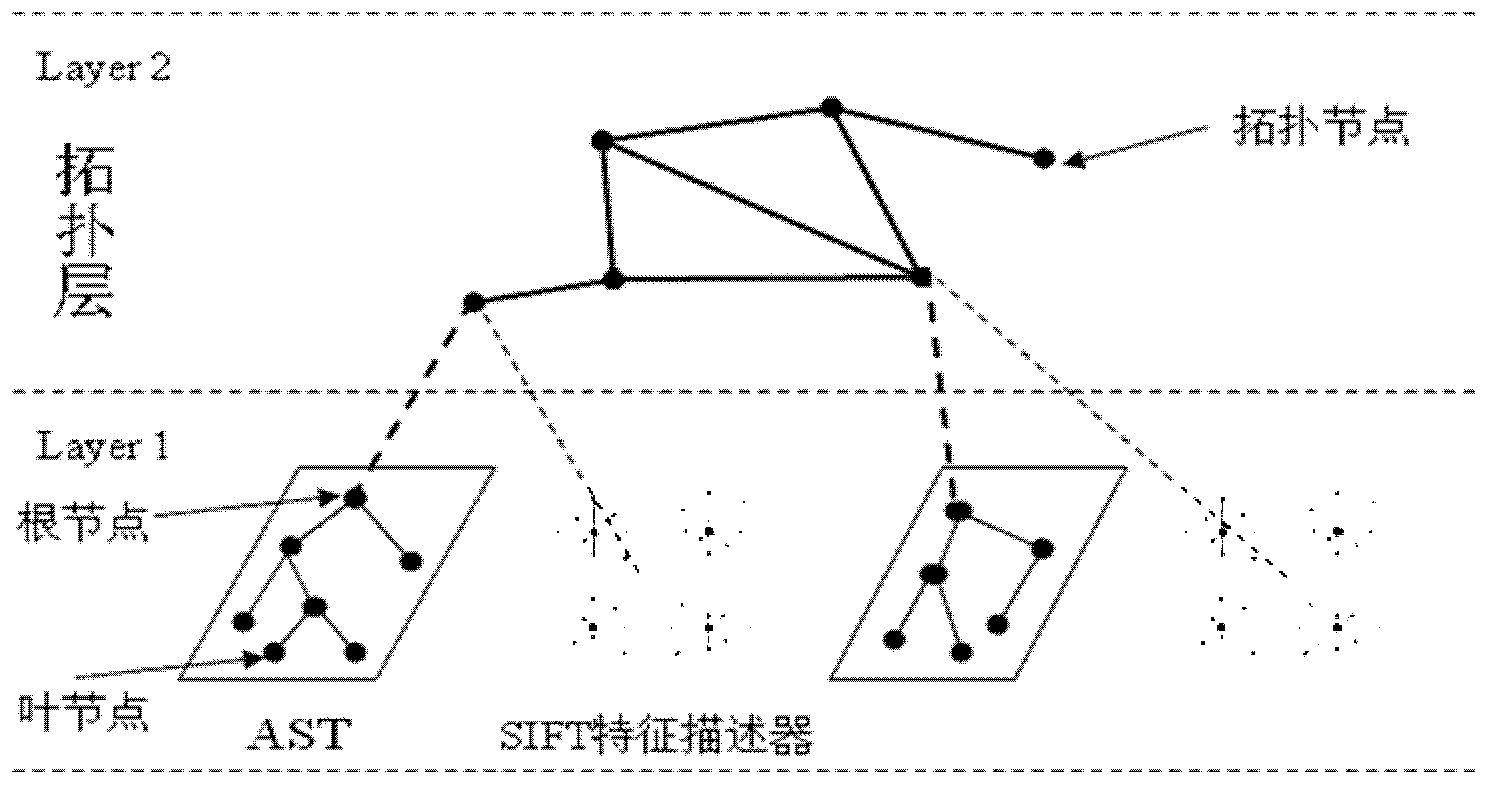
[0028] The flowchart of the method of the present invention is attached figure 1 shown, including the following steps:
[0029] Step 1, obtain the traversable space tree,.
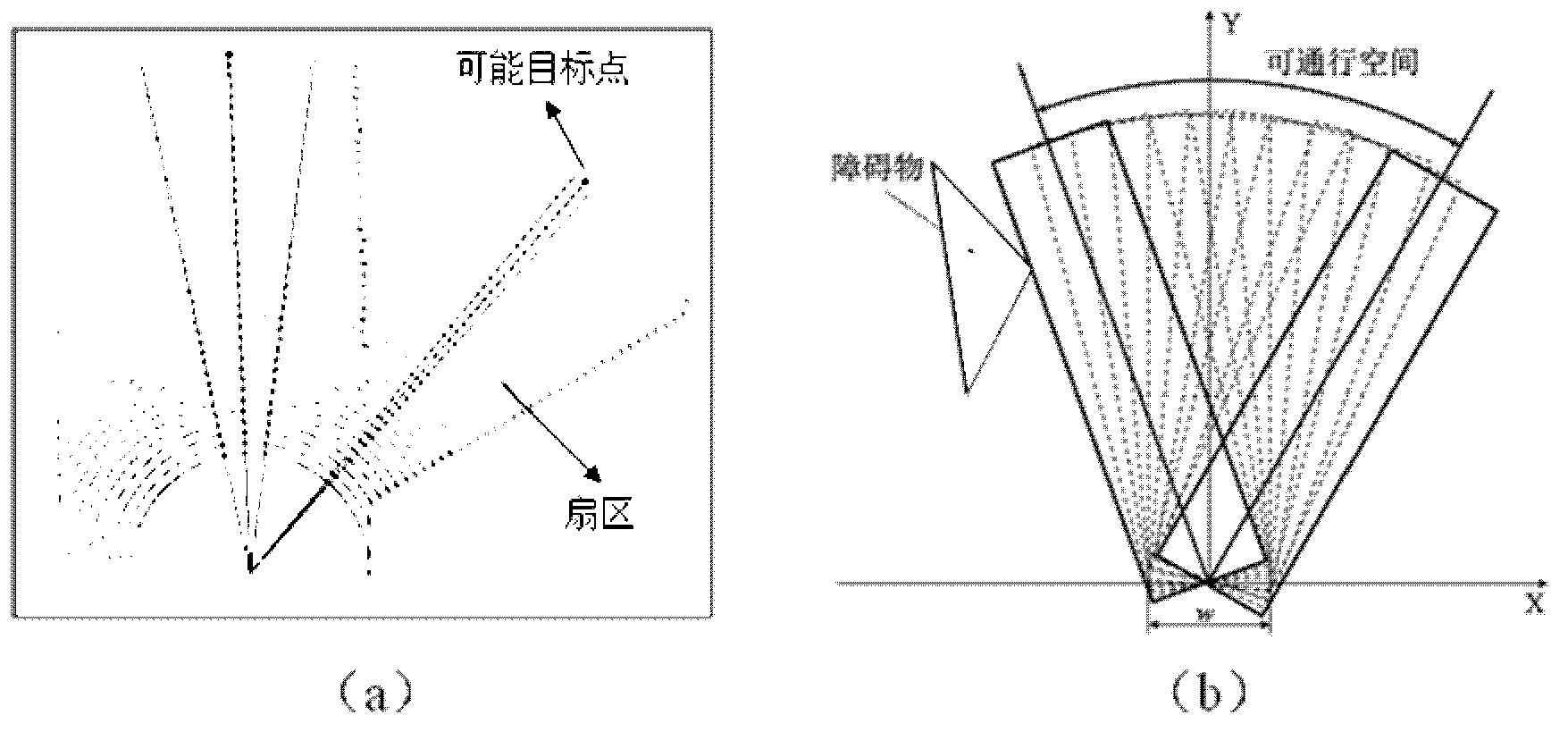
[0030] The traversable space tree is composed of traversable space and possible target points. The specific establishment method is as follows:
[0031] (1) Get sector
[0032] Using the acquired laser data information, the scanning area from the nearest obstacle to the robot to the maximum range of the laser is divided into several layers, each layer contains several arcs, and the area surrounded by the arcs is called a sector.
[0033] (2) Judging the passable angle range
[0034]Assuming that there is a rectangular channel, set the threshold w greater than the width of the robot, and set w as the width of the rectangle. Make the rectangle rotate around the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More