

A task allocation method for unmanned aerial vehicle formation in a definite environment
A technology for unmanned aerial vehicles and task assignment, applied in the field of unmanned aerial vehicles, can solve problems such as accelerating the convergence speed of modern optimization algorithms and local search capabilities, and achieve the effects of easy understanding, simple operation, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
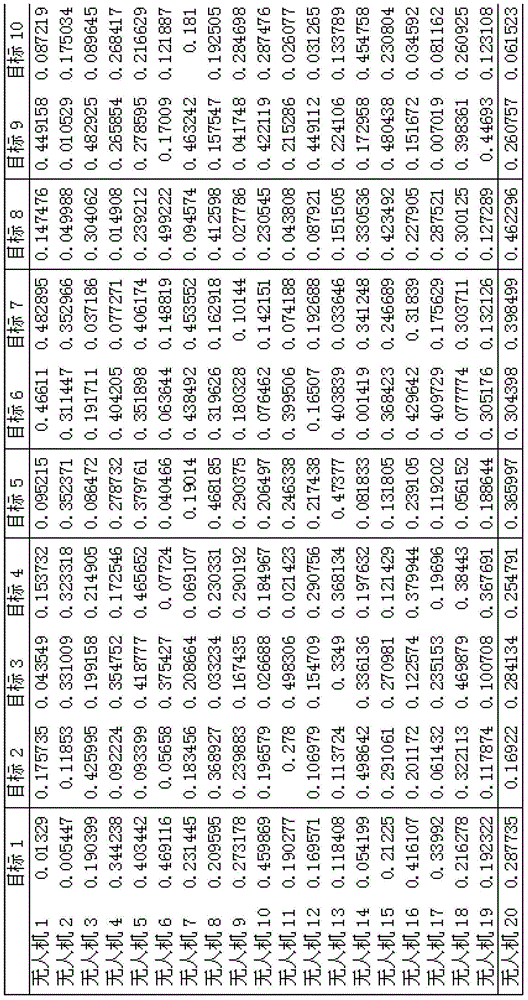
[0034] First, describe the problem to be solved, and the advantages of the task are as follows: figure 1 As shown, the normalized number in the table represents how much capability UAV (also known as unmanned aerial vehicle) has to perform the task, and the value in row i and column j indicates how much capability UAV i has to perform task j (that is, task Goal j) in the dominance table, defined as D i,j , figure 1 where i=1,2,...,20; j=1,2,...,10. The purpose of UAV formation task assignment is to determine the combination of UAVs to perform tasks, so as to maximize the execution efficiency of UAV formation tasks.
[0035] The present invention provides a method for allocating unmanned aircraft formation tasks in a certain environment, comprising the following steps:
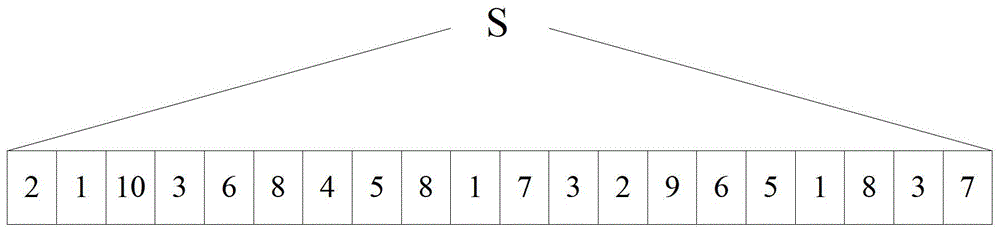
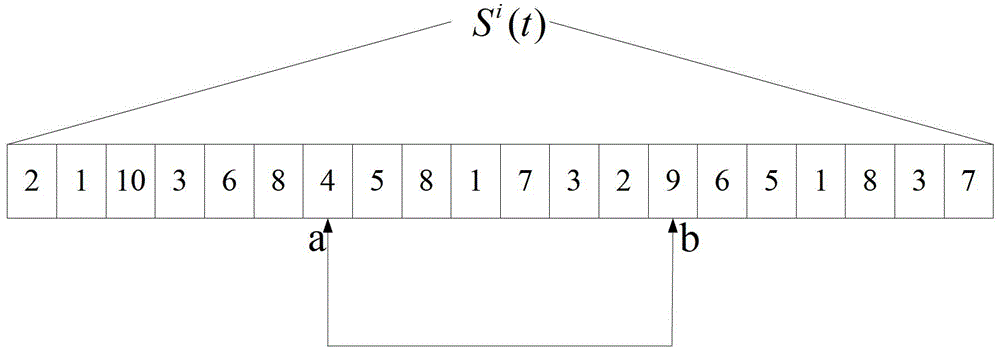
[0036] Step 1: Determine the coding sequence of the task allocation algorithm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More