

A collision avoidance system and method for human commanded systems
A technology of artificial and motion commands, applied in traffic control systems, buildings, instruments, etc., can solve the problem of non-convex obstacle set detail level strategy mismatch
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] A preferred embodiment of the invention will now be described by way of example and with reference to the accompanying drawings.
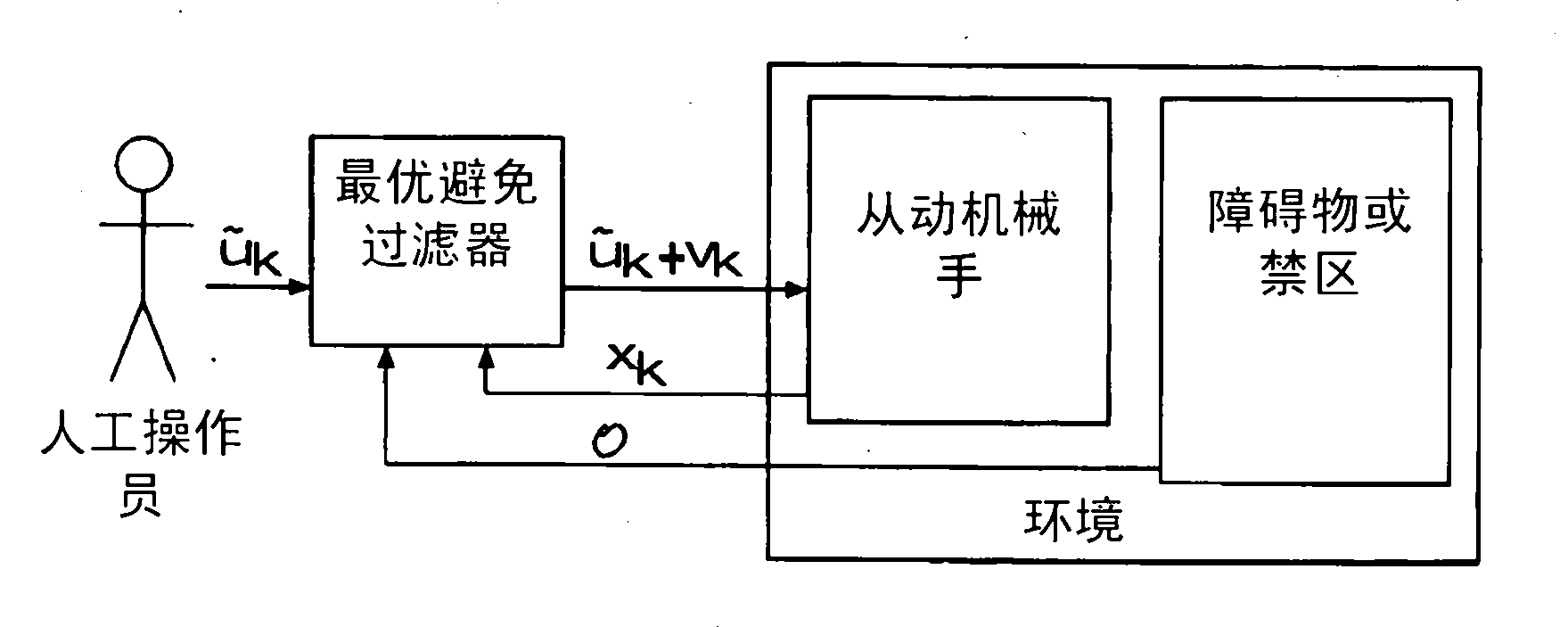
[0072] The preferred embodiment uses an Optimal Avoidance Filter unit (or OAF), and it is synthesized using a Rolling Time Domain Control (RHC) framework in which control actions are determined by predicting the system for a given time bound For future evolution, optimize the time-bound control sequence to obtain the most desired future system evolution, and apply the first control action in the optimized control sequence (Rossiter2003, Maciejowski2002). RHC has two advantageous properties when used to avoid filtering problems. First, the predictive nature of rolling time-domain control allows constraints associated with the slave manipulator, such as driver torque and velocity constraints, to be explicitly considered when determining control actions. Second, future avoidance of obstacles can be guaranteed, even when the operator's future i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More