

Self-navigation method for planetary power descending branch
A technology of powered descent and autonomous navigation, applied in the field of deep space exploration, can solve problems such as difficult to use planetary landing missions, and achieve the effect of ensuring accuracy and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] In order to better illustrate the purpose and advantages of the present invention, the content of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
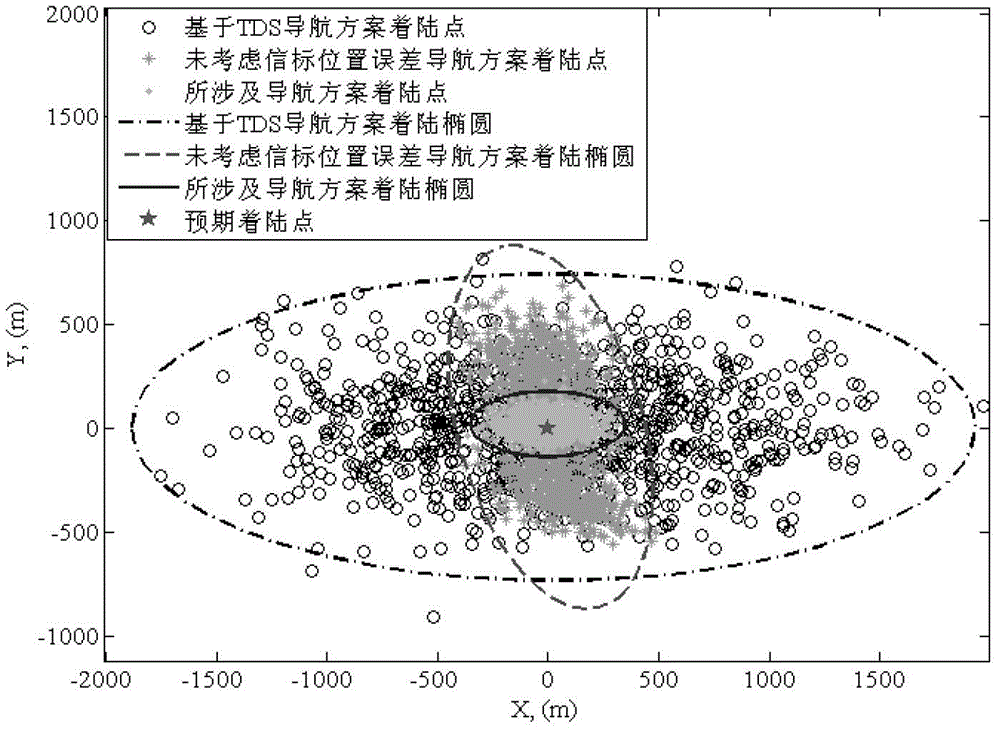
[0048] This example is aimed at the dynamic descent section of Mars, based on the integrated navigation method of radio measurement, descent sensor and navigation camera, using the radio ranging information between the probe and three radio beacons, the distance measurement information of the descent sensor and the navigation camera The angle measurement information is combined with the extended Kalman filter for filter calculation to achieve high-precision real-time autonomous navigation.
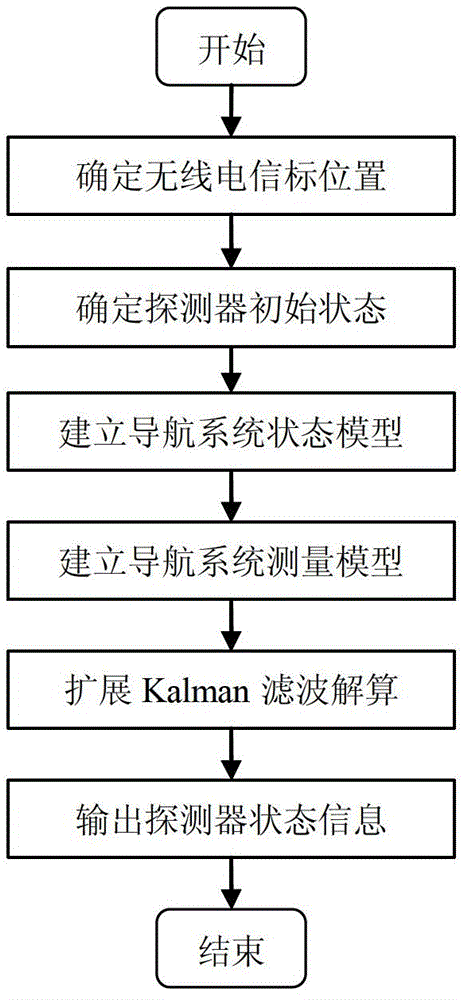
[0049] The specific process is as figure 1 As shown, its implementation method is as follows:
[0050] Step 1: Establish the state model of Mars power descent section
[0051] The state model of the probe is established in the inertial coordinate system of the Mars la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More