

Control device and control method for achieving C arm system follow-up motion
A control device and control method technology, applied in the field of medical equipment, can solve the problems of other joints that cannot be controlled, large-stroke operation is unfavorable for doctors to operate, and cumbersome operating procedures, so as to save time required for positioning, avoid inconvenient operation, and simple operation convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
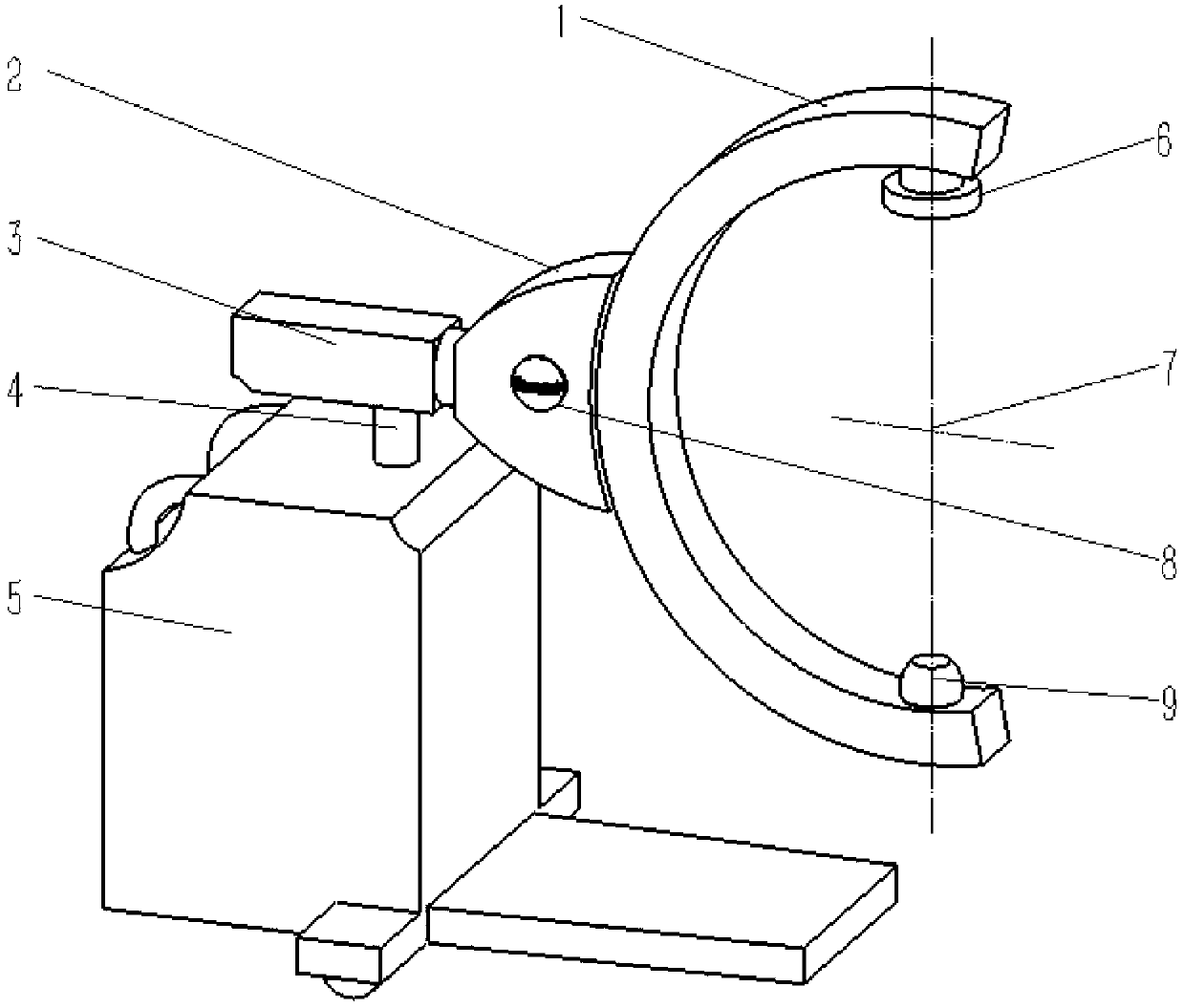
[0042] Embodiment 1. The embodiment of the present invention provides a control device for realizing the follow-up motion of the C-arm system, including an active drive element, an auxiliary control handle, an infrared switch and a force sensor. Each joint of the C-arm system is equipped with an active drive component, the auxiliary control handle is connected with the C-arm system through the force sensor, and the auxiliary control handle is provided with an infrared switch. In the open state, the force sensor obtains the operation intention and transmits the instruction to each joint The active drive element drives each joint of the C-arm system to move.
[0043] see figure 1 , in this embodiment, the structure of the C-arm system consists of four parts, including: X-ray system, C-arm (1), support arm (2), mobile frame (3) and lifting frame (5), the The X-ray system includes an X-ray light source (9) fixed at both ends of the C-arm (1) and an image detection device (6). The...
Embodiment 2
[0058] Example 2, please refer to Figure 5 , an embodiment of the present invention provides a control method for realizing the follow-up motion of a C-arm system, including the following steps:
[0059] (1) Control state detection: detect the infrared switch state of the auxiliary control handle. When the auxiliary control handle is not held, the infrared switch signal is 0, the follow-up motion function is turned off, and the system does not respond to the force sensor signal. C The arm system remains stationary, when the auxiliary control handle is held, the infrared switch signal becomes 1, the follow-up motion function is turned on, and the system responds to the force sensor signal;
[0060] Preferably, a period of start-up delay, such as 1 second, is set in the control state detection, that is, the system starts to respond to the force sensor signal after 1 second after the infrared switch is triggered.
[0061] (2) Force sensor signal processing: After filtering high...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More