

Laser strapdown inertial navigation system
A strapdown inertial navigation and laser technology, applied in the field of inertial navigation, can solve the problems of poor versatility and high cost, and achieve the effect of strong versatility and cost reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
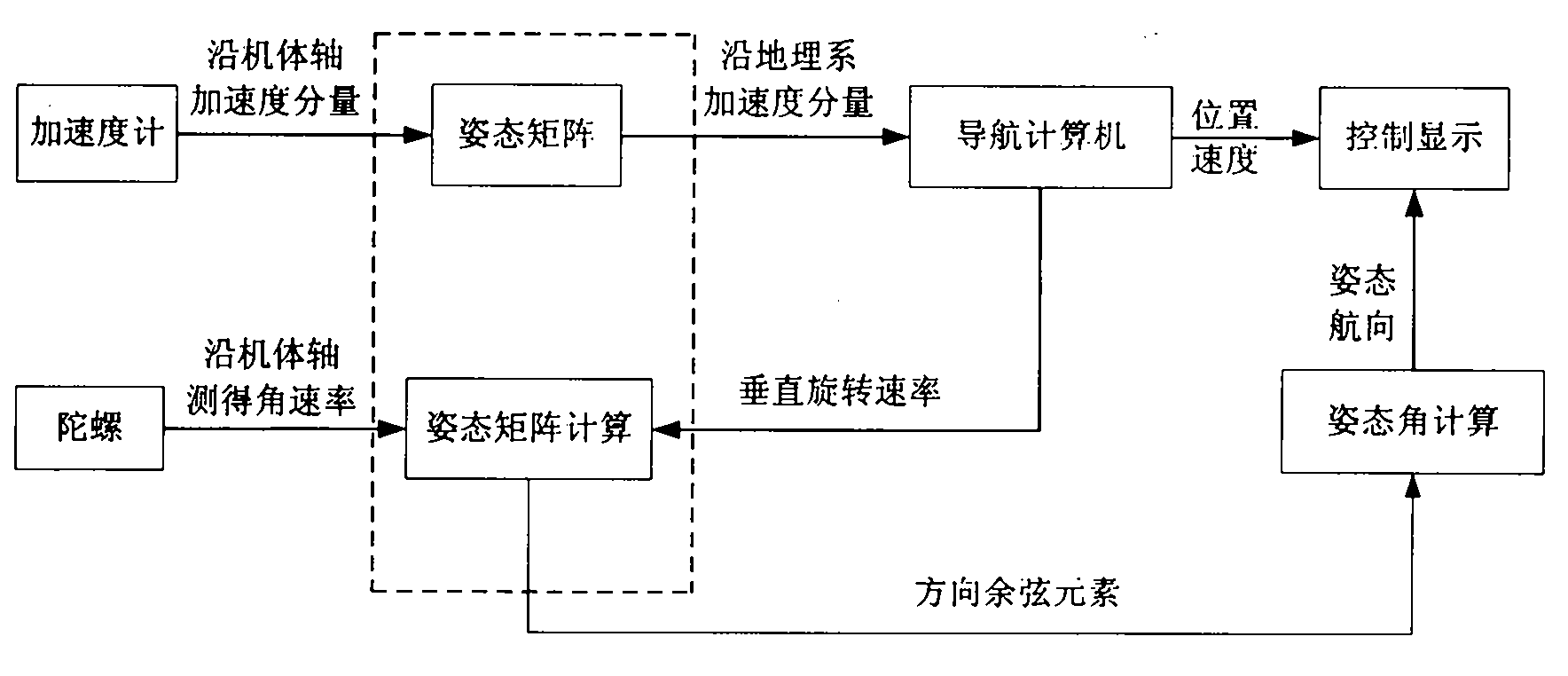
[0051] Such as figure 1 Shown, a kind of laser strapdown inertial navigation system is characterized in that, described system comprises:
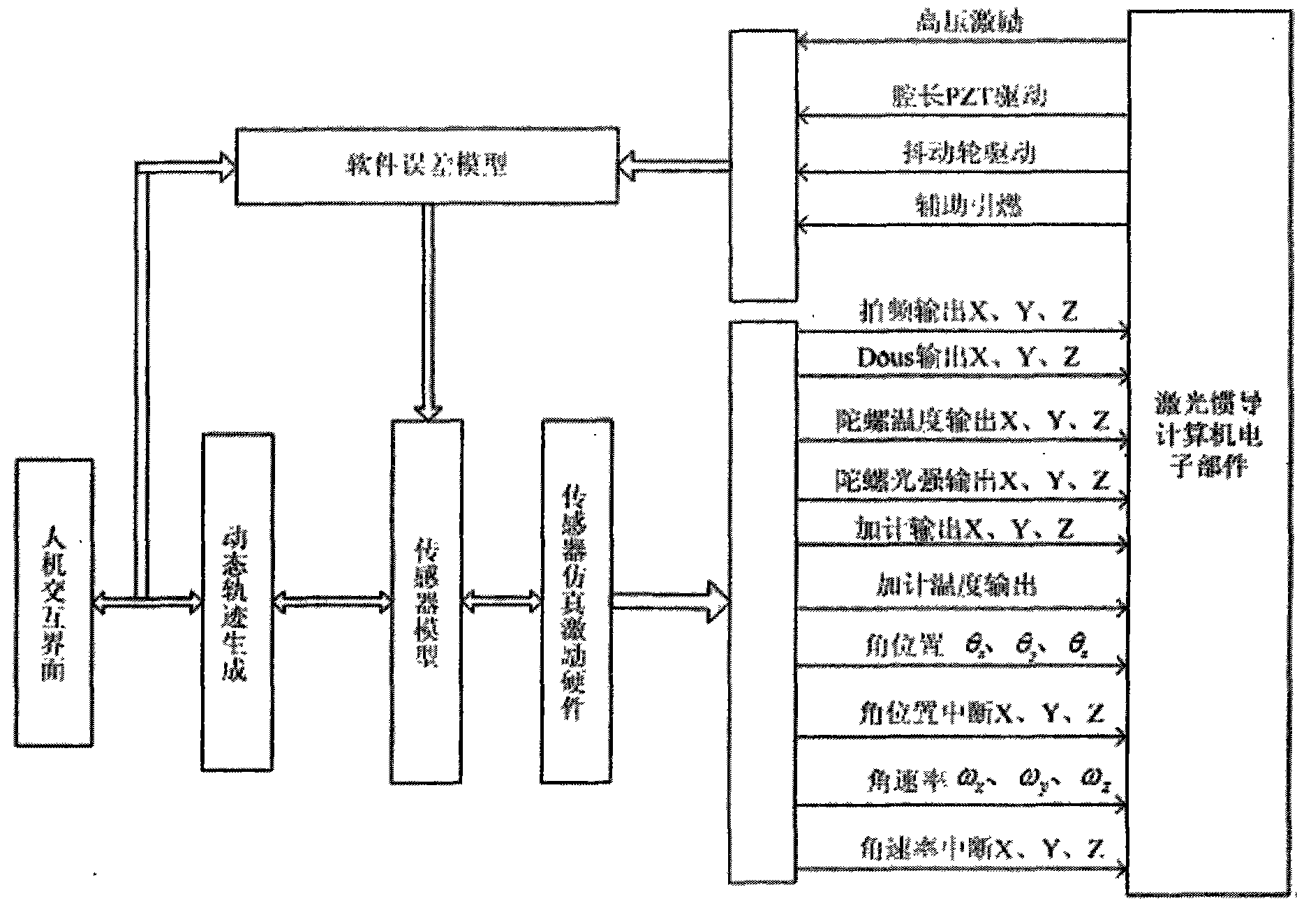
[0052]Human-computer interaction interface module: used to realize man-machine dialogue, parameter setting of carrier trajectory in the simulation system, software gyroscope and accelerometer model parameter setting and simulation result display;
[0053] Dynamic trajectory generation: used to generate aircraft flight trajectory;
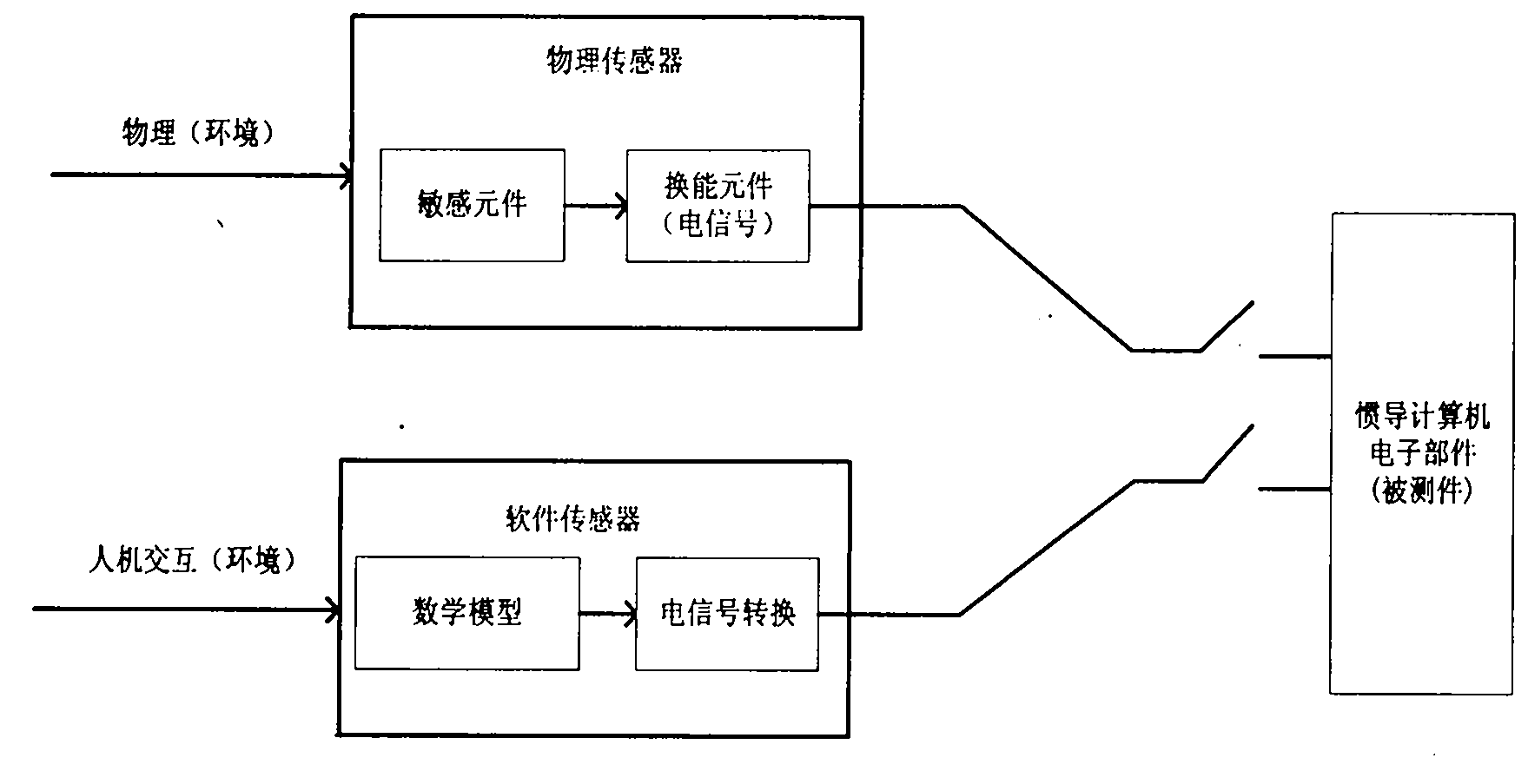
[0054] Sensor module: the attitude angle information and accelerometer information on the track point at a certain moment output by the dynamic trajectory generation algorithm module are used as the input of the software sensor, and the attitude of the aircraft at this moment is obtained by solving the gyroscope mathematical model and the accelerometer mathematical mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More