

Indoor robot navigation device and navigation technology thereof
An indoor robot and navigation device technology, applied in two-dimensional position/channel control and other directions, can solve the problems of poor electromagnetic navigation flexibility, large real-time computation, inaccurate positioning, etc., to improve the accuracy and efficiency of motion control, anti-interference The effect of strong ability and good anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
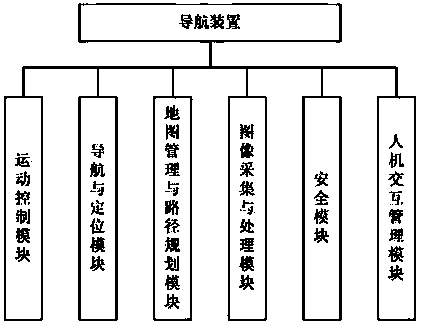
[0041] like figure 1 As shown, an indoor robot navigation device based on area refinement and visual positioning includes a circuit board, and the circuit board is provided with a motion control module, a navigation and positioning module, a map management and path planning module, an image acquisition and processing module, a safety module, human-computer interaction management module.
[0042] The motion control module is used to adjust the motion posture and control the motion state of the robot.
[0043] The navigation and positioning module obtains the accurate position of the robot through inertial navigation and visual correction, and realizes precise robot navigation and positioning.
[0044] The map management and path planning module is used for the construction and refinement of the map and the planning of the robot motion path.
[0045] The image acquisition and processing module collects and processes road sign images, obtains the current position of the robot, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More