

Method for solving attitude and heading reference system of four-rotor unmanned aerial vehicle based on gradient descent
A quadrotor UAV and gradient descent technology, which is applied in the field of quadrotor UAV attitude and heading reference system calculation based on gradient descent, can solve the problems of large sensor drift, system error accumulation, and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The method for calculating the attitude and heading reference system of the quadrotor UAV based on gradient descent of the present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
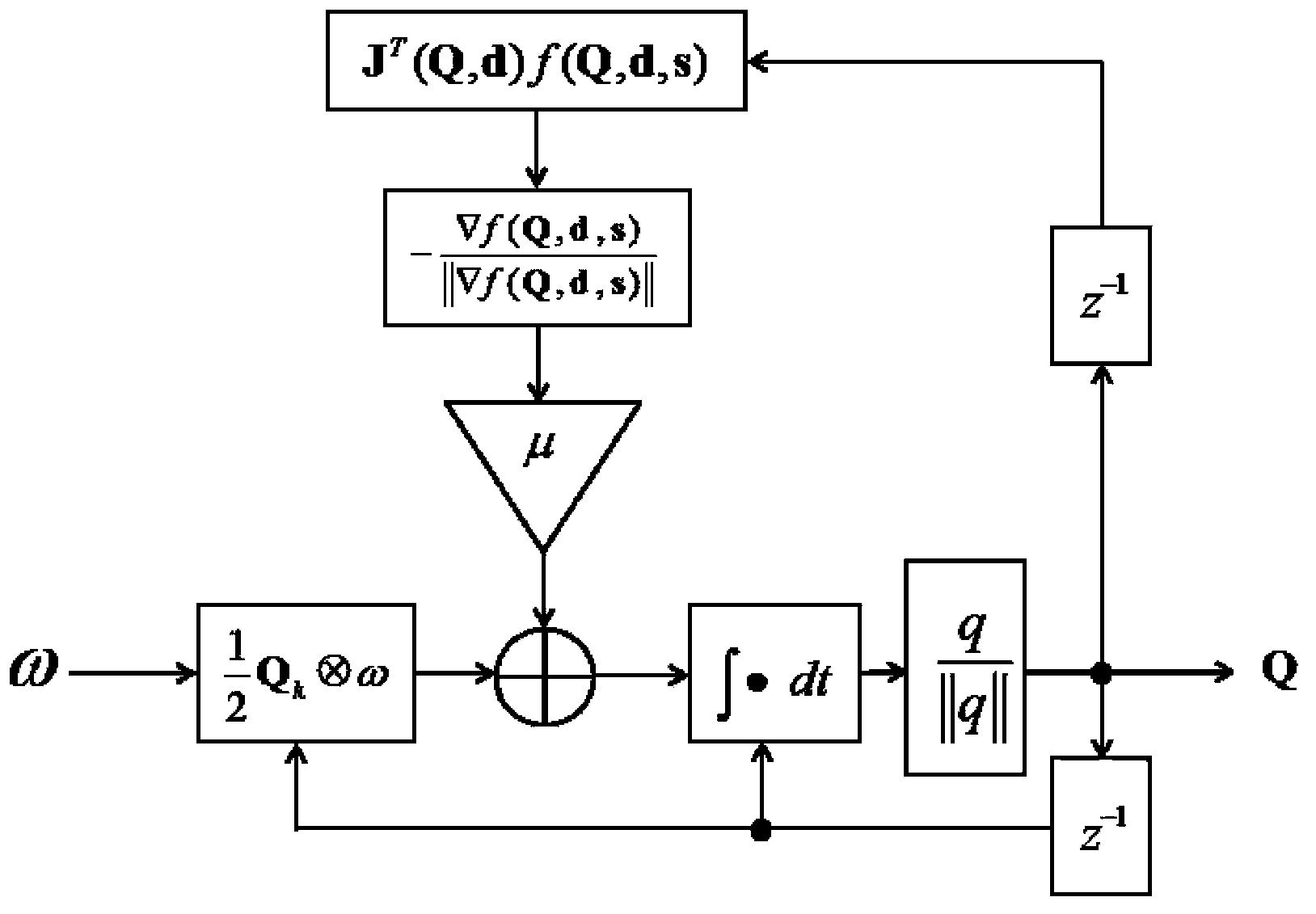
[0045] Such as figure 1 As shown, the gradient descent-based four-rotor UAV attitude heading reference system solution method of the present invention comprises the following steps:
[0046] 1) The attitude information of the micro-quadrotor UAV is collected by the gyroscope, acceleration sensor, and geomagnetic sensor. The sensor measures the magnetic field information of the position of the micro quadrotor UAV;
[0047] 2) Apply the quaternion update algorithm based on gradient descent to fuse the data collected by the acceleration sensor and the geomagnetic sensor with the data collected by the gyroscope to correct the drift of the gyroscope;
[0048] The drift of the corrected gyroscope is:
[0049] Let the measured value o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More