

Hydraulic hard and soft mechanical arm control method based on two-parameter singular perturbation
A technology of singular perturbation and control method, applied in manipulators, manufacturing tools, etc., can solve the problems of inability to effectively suppress vibration phenomenon, difficult to implement, and complex controller design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
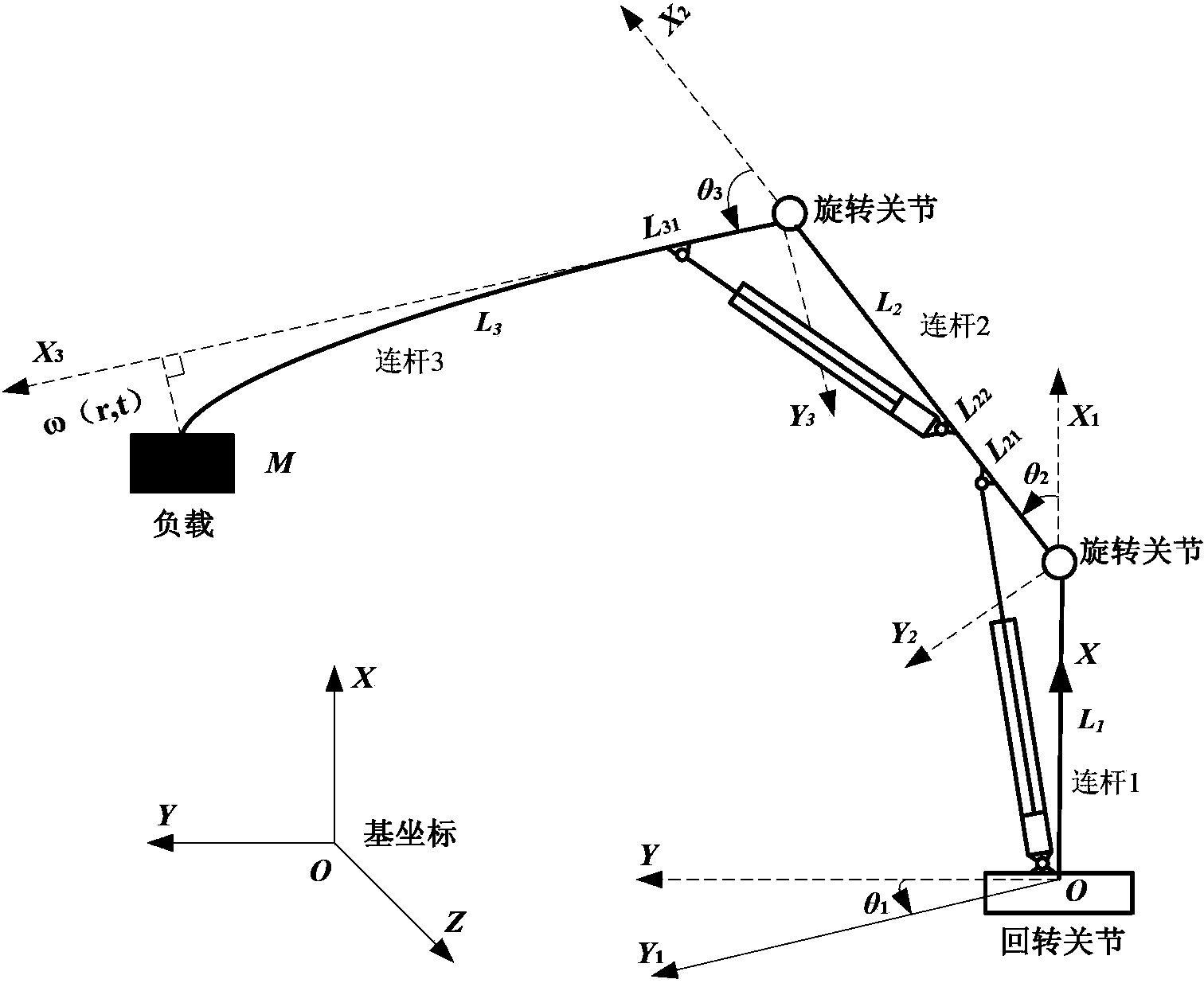
[0050] Such as figure 1 As shown, the control object of the present invention is a hydraulic rigid-flexible manipulator system, which is composed of three connecting rods, a revolving base and two rotating joints, wherein connecting rod 1 and connecting rod 2 are rigid arms, and connecting rod 3 is a flexible arm , The rotary joint is in the shape of a circular platform, driven by a hydraulic motor, and the rotary joint is driven by a valve-controlled single-rod asymmetric hydraulic cylinder. The lengths of the three connecting rods are L 1 , L 2 , L 3 , the installation positions of the hydraulic cylinders are respectively L 21 , L 22 , L 31 . θ=[θ 1 θ 2 θ 3 ] T is the joint rotation angle of the connecting rod. XOY is the inertial coordinate, X i OY i (i=1,2,3) are the moving coordinates fixed on the mechanical arm. There is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More