

Partially cyclically repetitive controller applied to position servo system
A technique for repetitive controllers and servo systems, applied to controllers with discontinuous output signals, electric controllers, etc., can solve problems such as reduced system control accuracy and increased internal model order
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
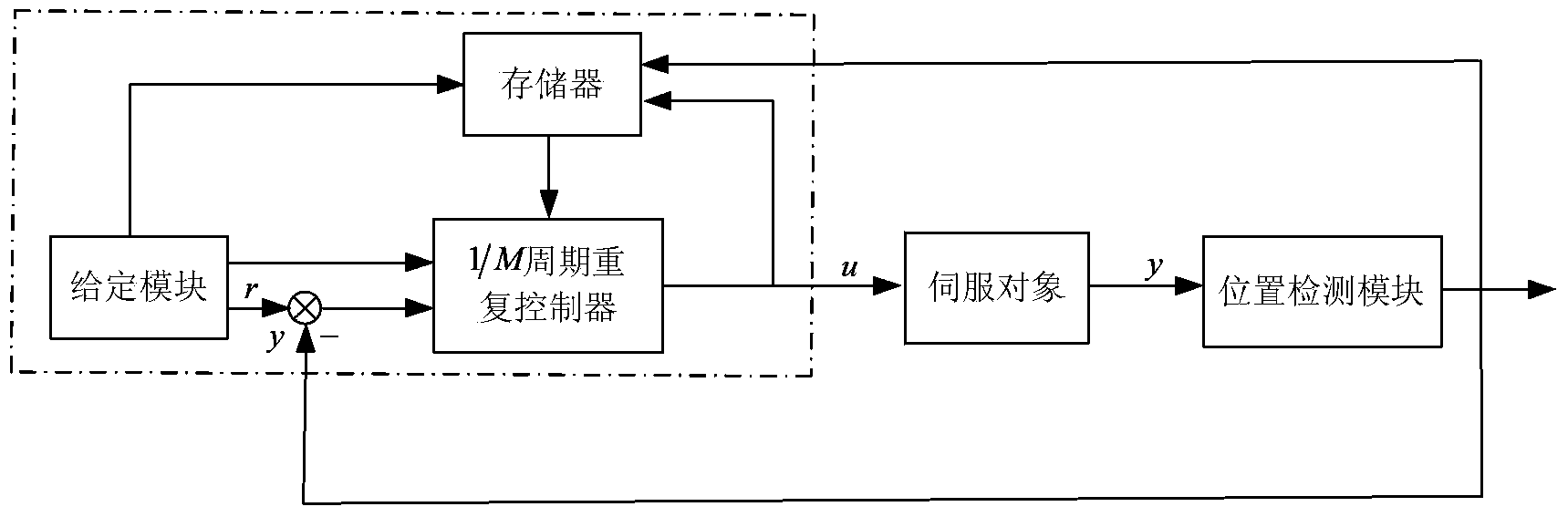
[0192] In this embodiment, a linear motor servo system is used as an example to perform repetitive tracking tasks in a fixed interval, and its position reference signal has a 1 / M cycle symmetric characteristic. When the servo system enters the steady-state stage, the disturbance term in the system model will show obvious 1 / M cycle symmetry characteristics. The discrete repetitive controller designed in this embodiment is used as the position loop controller in the three-loop control system of the linear motor, and the current loop and the speed loop adopt the PI control algorithm.
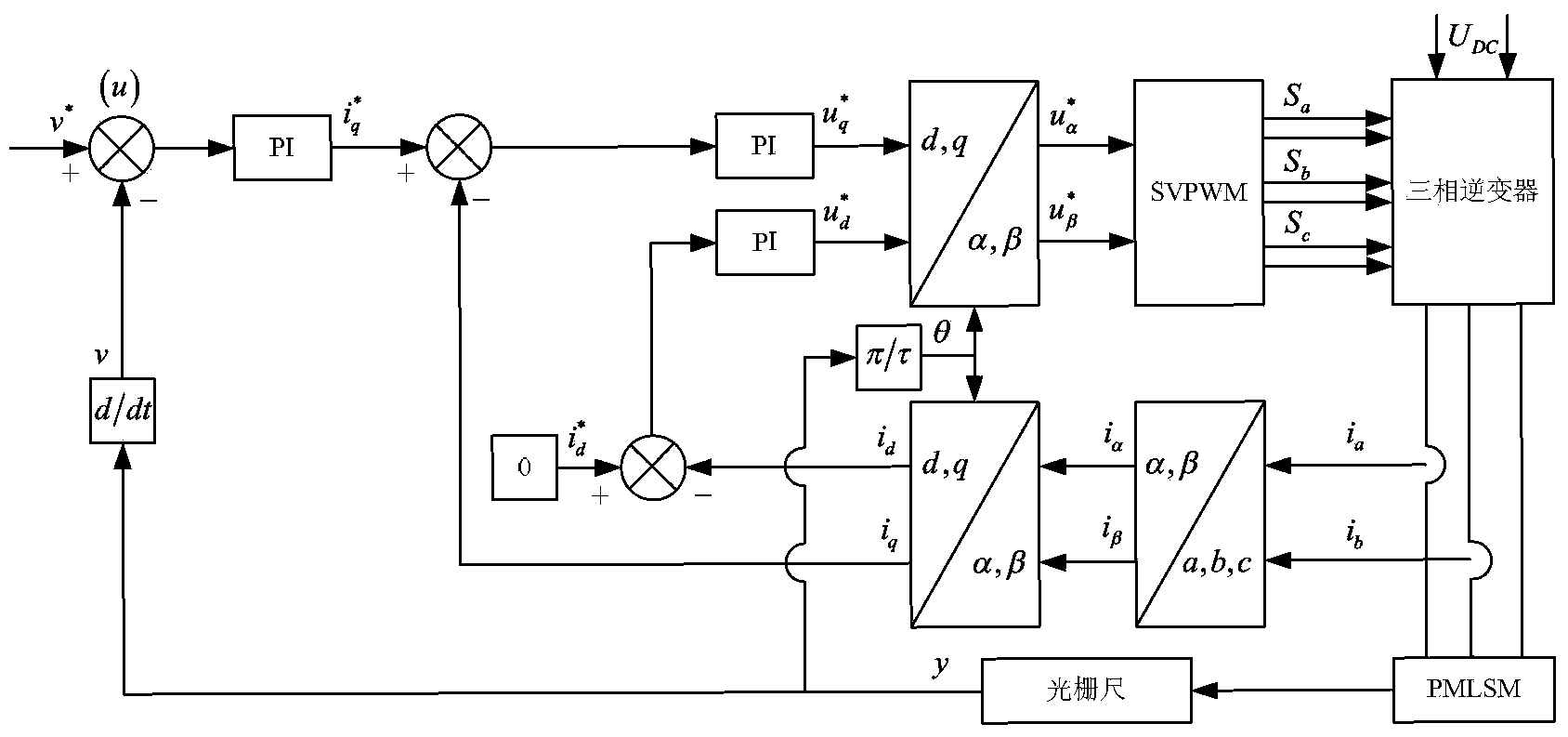
[0193] Before designing the position loop controller, it is necessary to establish the mathematical model of the servo object other than the position loop, including the speed loop, current loop, power driver, linear motor body and detection device (see figure 2 ).
[0194] Obtaining the Mathematical Model of the Servo Object Using the Least Square Identification Algorithm
[0195] the y k+1 -0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More