

Multi-model control method based on self learning
A control method and multi-model technology, applied in the field of control of complex nonlinear systems, can solve problems such as lack of robustness of system feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in further detail below in conjunction with the accompanying drawings.
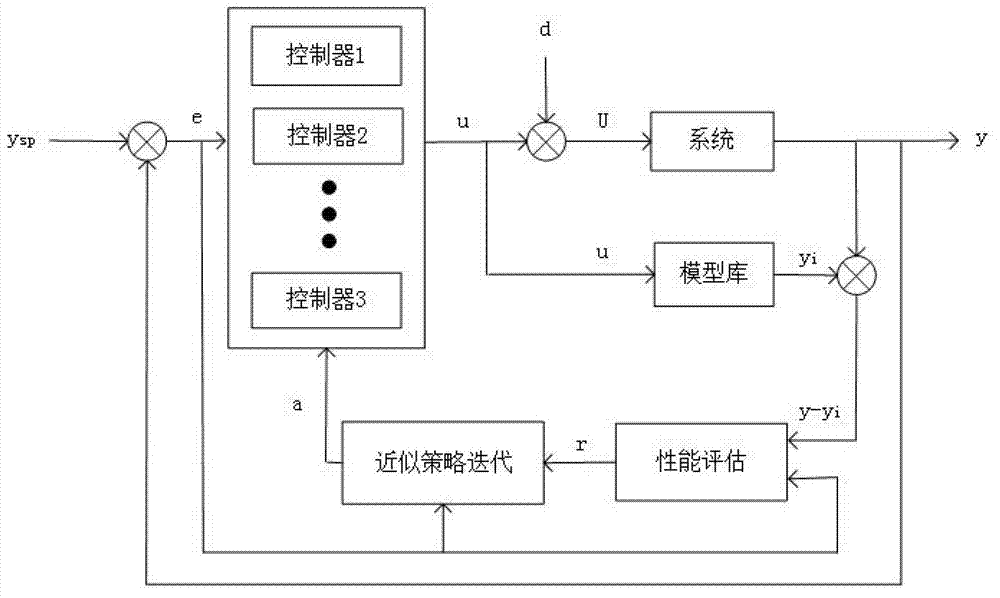
[0059] Such as figure 1 Shown, the present invention is based on the multi-model control method of self-learning, and its steps are:
[0060] (1) Build a model library; it consists of a set of local models of nonlinear models;
[0061] (2) Construct a set of controllers, which are designed according to the local models in the model library. This is because the design of local model controllers is simpler and more flexible than the design of global nonlinear model controllers. For example: for A linearized model, the LQR controller can be designed as u i =-K i x(i=1,2,...,n);
[0062] (3) Execution performance evaluation: observe output error and system output y and model output y i difference between. Based on these signals, a performance feedback or value function will be calculated and sent to the API module. A value function based on the error betwe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More