Indoor-mobile-robot-oriented optical flow field vision/inertial navigation system (INS) combined navigation method
A mobile robot and integrated navigation technology, applied in directions such as road network navigators, can solve problems such as the decline of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The invention will be described in further detail below in conjunction with the accompanying drawings.
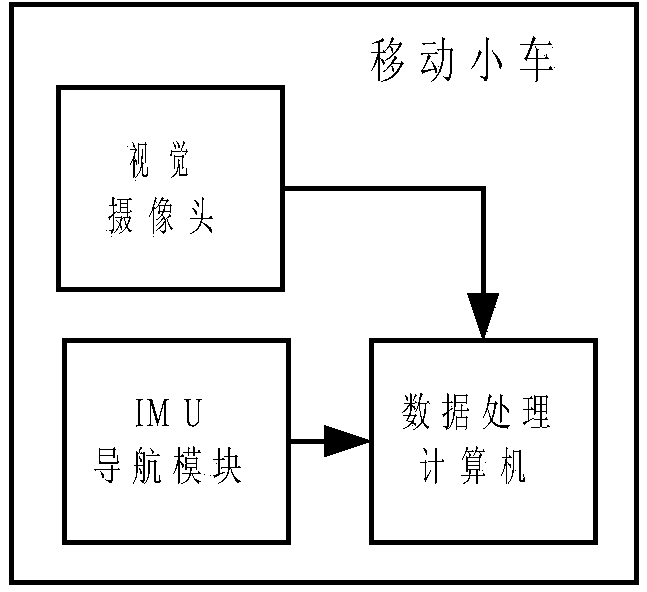
[0045] like figure 1 As shown, a system of optical flow field vision / INS combined navigation method for indoor mobile robots, including a vision camera, an inertial measurement unit (IMU) navigation module and a data processing computer.
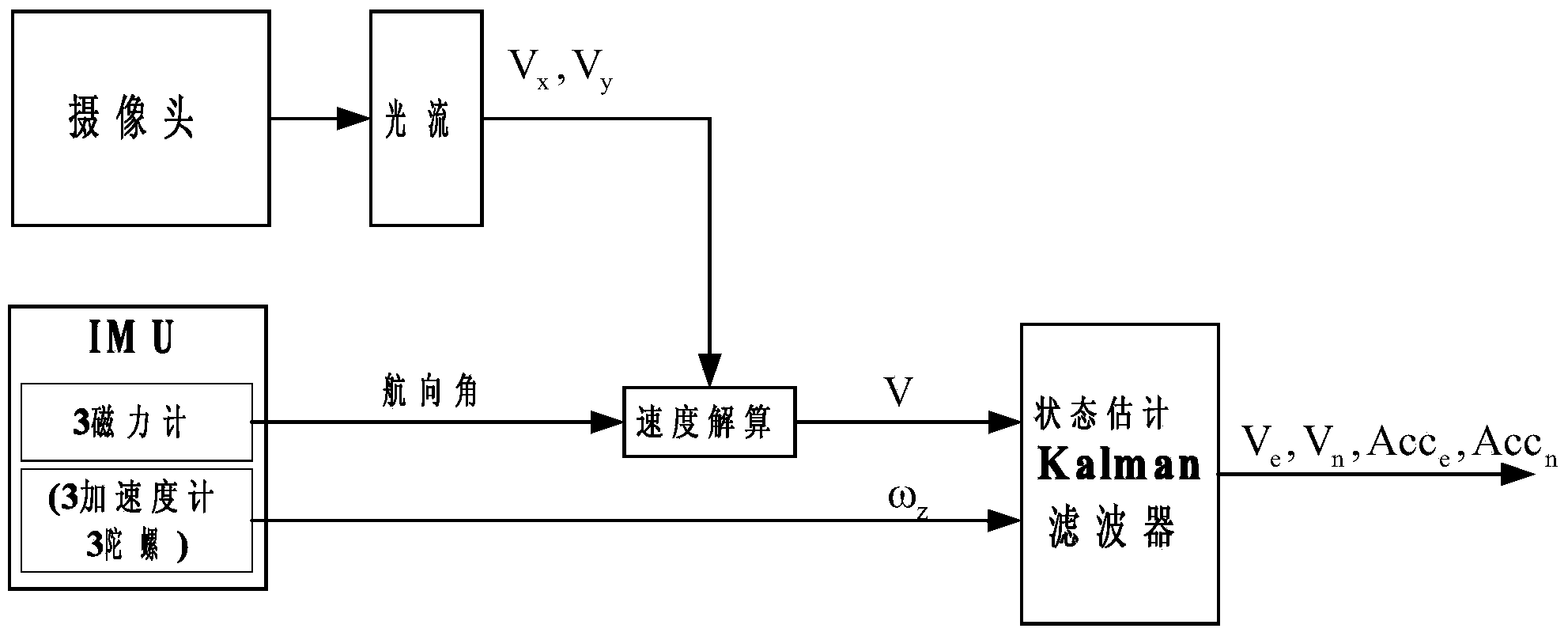
[0046] The system equation of the extended Kalman filter takes the eastward and northward velocity and acceleration of the INS at each moment as state variables, and the V obtained by visual measurement at each moment E , V N and the heading angle variation ω measured by INS Z as an observation. The system equation of the filter is shown in formula (13):
[0047]
[0048] in is the system noise, and the observation equation is shown in equation (14):
[0049]
[0050] where υ 3×1 is the observation equation noise, V E,k ,V N,k ,Acc E,k ,Acc N,k respectively represent the eastward velocity, northward velocity, east...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com