

Visual navigation/inertial navigation full combination method
A technology of visual navigation and inertial navigation, which is applied in the field of full combination of visual navigation/inertial navigation, which can solve the problems that the combination effect cannot be optimal, and the prior information of the object space coordinates of image feature points is not considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
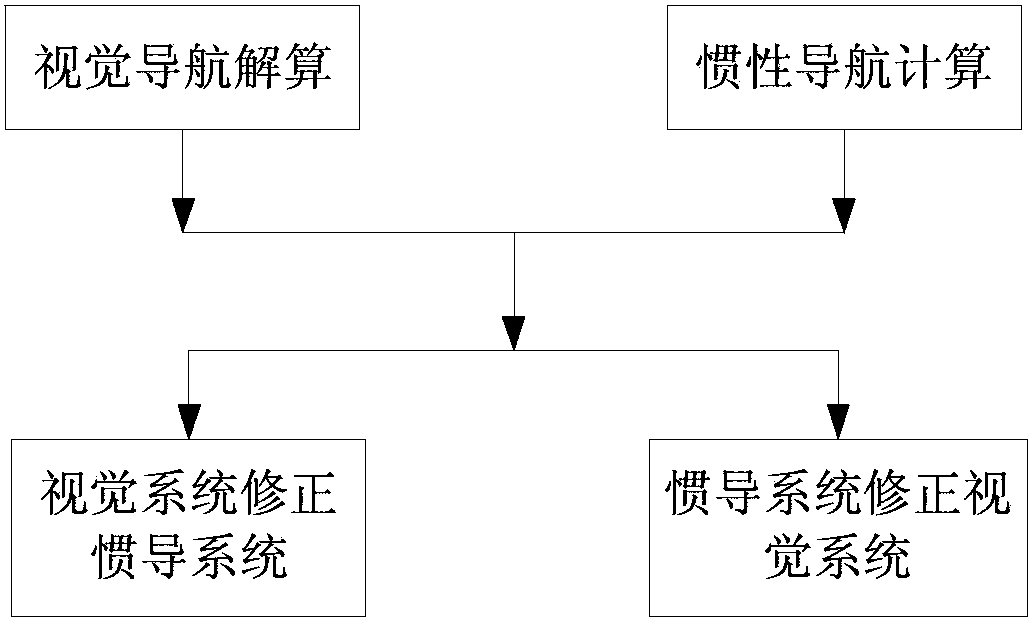
[0085] Such as figure 1 As shown, a fully combined method of visual navigation / inertial navigation, the method includes the following steps:
[0086] 1) Visual navigation solution
[0087] Proceed as follows:
[0088] (1) Initialization of the camera's outer orientation elements. Generally, some control points are arranged around the starting position of the visual navigation, and the camera's outer orientation elements are obtained through resection.
[0089] (2) The carrier is constantly moving, and the stereo camera is used to obtain the image at the current moment for feature point extraction and matching. The feature point matching includes two aspects: one is to match the feature points of the left and right images at the current moment, and the other is to match the current The left image at the moment is matched with the left image at the previous moment.
[0090] (3) Based on the collinear equation, the observation equation is established for all the feature points...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More