

Longitudinal-transverse-vertical force cooperative control method of distributed electrically driven vehicle
A technology of collaborative control and vehicle control system, which is applied in the field of optimal distribution and control of longitudinal and vertical forces of horizontal and distributed electric drive vehicles, and can solve problems such as inability to achieve control effects, lack of theoretical basis, unified optimal distribution, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0080] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
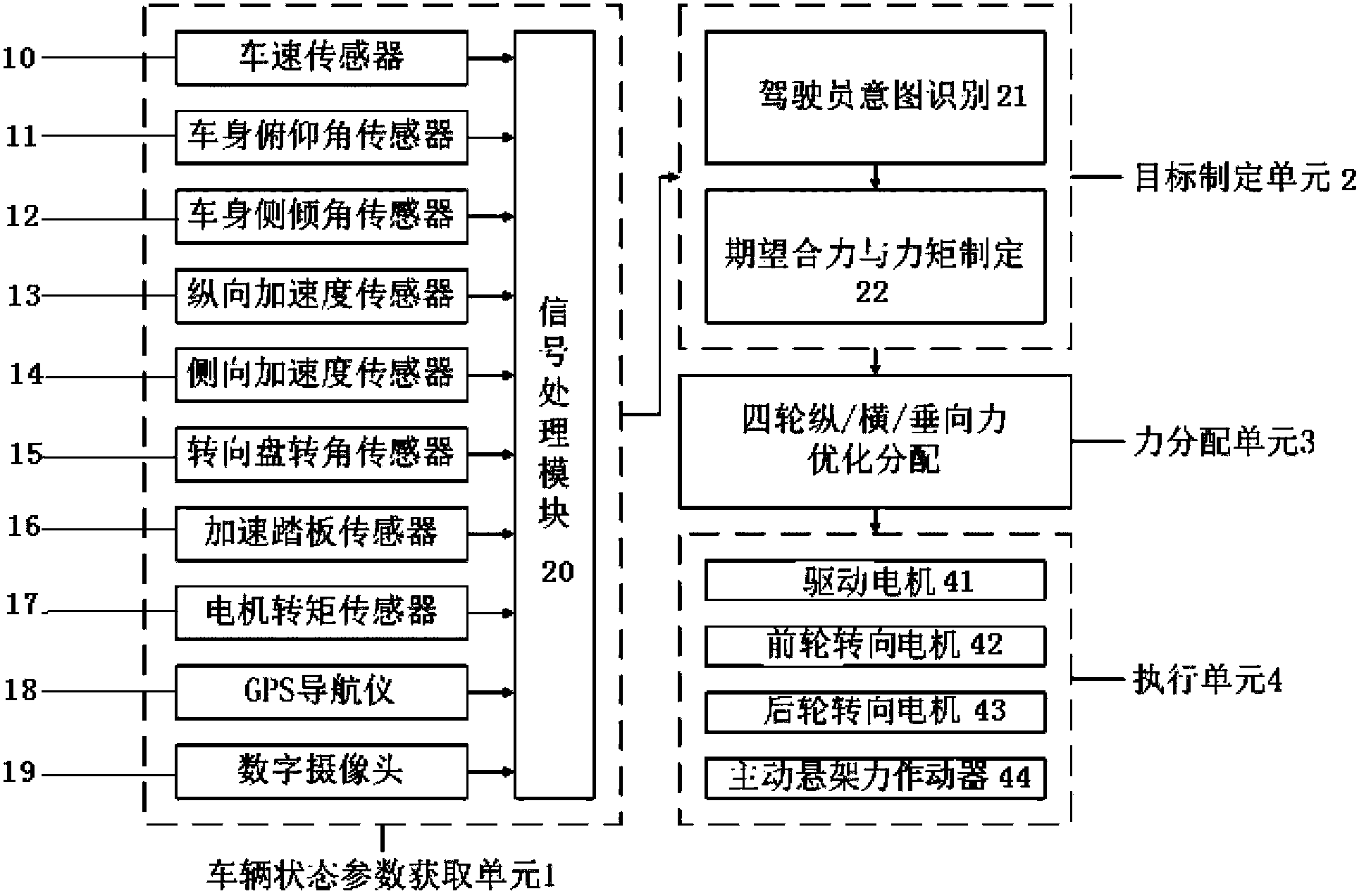
[0081] Such as figure 1 As shown, in order to realize the cooperative control method of longitudinal, horizontal and vertical forces described in the present invention, the present invention provides a chassis integrated control system, based on which the collection of parameters, the formulation and distribution of forces, and the final implement. Therefore, the control system is mainly composed of vehicle state parameter acquisition unit 1 , target formulation unit 2 , force distribution unit 3 and execution unit 4 . Among them, the vehicle state parameter acquisition unit 1 obtains the state parameters required by the system through sensors; the target formulation unit 2 judges the driver's intention according to the vehicle state information obtained by the vehicle state parameter acquisition unit 1 and uniformly formulates the vehicle's longitud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More