

Laser strapdown inertial navigation system prism ridge orientation installation error calibration method
A strapdown inertial navigation and installation error technology, which is applied in the field of strapdown inertial navigation systems, can solve the problems that the results are easily affected by the test equipment and the operation process, the installation error of the strapdown inertial group prism, and the increase in calibration costs, etc., to achieve reduction Calibration cost, convenient operation, and solve the effect of complex operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Method of the present invention is as follows:
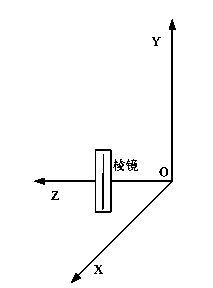
[0018] 1) Adjust the levelness of the marble slab or turntable to within 1″, install the laser strapdown inertial navigation system on a hexahedron box (the laser strapdown inertial navigation system itself has a positioning surface, and it can be placed stably), wipe the square Box (or laser strapdown inertial navigation system) positioning surface; can be according to figure 1 Place the laser strapdown inertial navigation system for the schematic diagram of the prism placement;
[0019] 2) Power on the laser strapdown inertial navigation system, set up the self-calibration value theodolite, make the height of the self-calibration value theodolite consistent with the prism height of the laser strapdown inertial navigation system, and make the self-calibration value theodolite aim at the laser strapdown inertial navigation system Prism;
[0020] 3) The self-alignment theodolite reads the pitch angle of the prism of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More