

Underwater pipeline detection tracking system and detection method of automatic remote control underwater robot
A technology of underwater robots and underwater pipelines, which is applied in the direction of two-dimensional position/channel control, etc., can solve the problems that the surface mother ship cannot monitor the underwater environment in real time, cannot realize real-time image transmission, and AUV loss, etc. Effects of transmission, extended range of underwater movement, and improved underwater mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
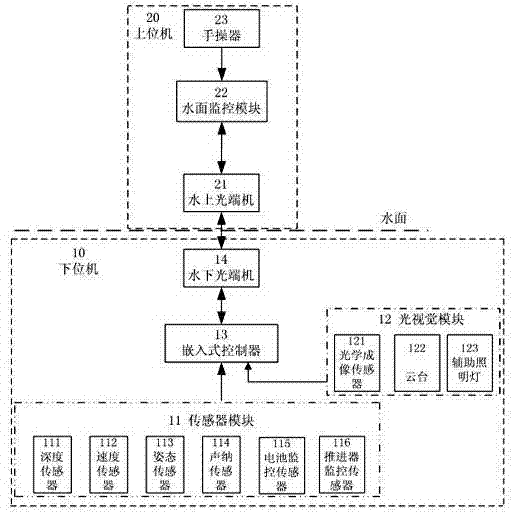
[0035] Such as figure 1 The shown a kind of autonomous remote control underwater robot underwater pipeline detection and tracking system comprises: lower computer 10 and upper computer 20, lower computer 10 is arranged under the water surface, upper computer 20 is arranged on the water surface mother ship; this lower computer 10 and this The host computer 20 is connected by optical fiber. The lower computer 10 includes: a sensor module 11 , an optical vision module 12 , an embedded controller 13 and an underwater optical transceiver 14 . The sensor module 11 and the optical vision module 12 are respectively connected to the signal input end of the embedded controller 13 , and the signal output end of the embedded controller 13 is connected to the signal input end of the underwater optical transceiver 14 .
[0036...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More