

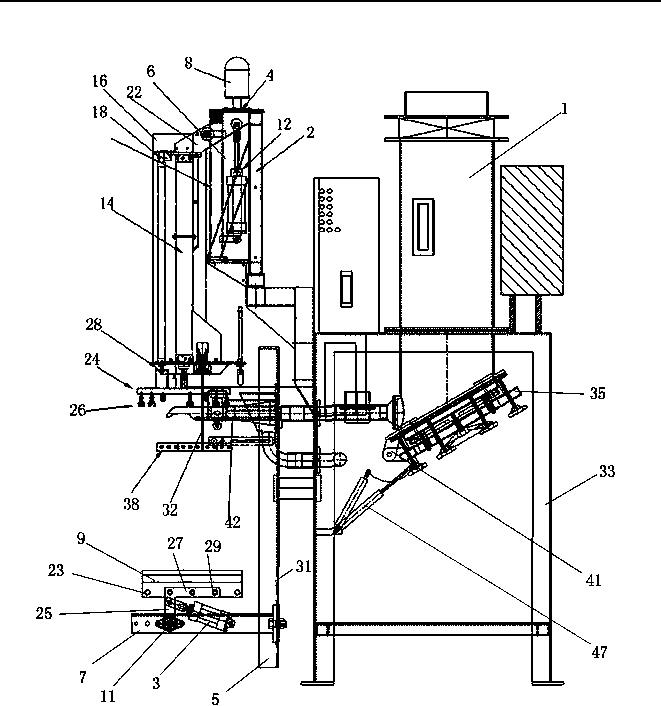
Packaging machine capable of taking bags, filling bags and transferring bags automatically
A packaging machine and material loading technology, which is applied in the field of mechanical equipment, can solve the problems of no transfer device between the packaging machine and the conveying equipment, waste of manpower, manual handling, etc., to achieve good adaptability, improve efficiency, improve accuracy and speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The present invention will now be further described in detail in conjunction with the accompanying drawings and embodiments. These drawings are all simplified schematic diagrams, only illustrating the basic structure of the present invention in a schematic manner, so it only shows the composition related to the present invention.
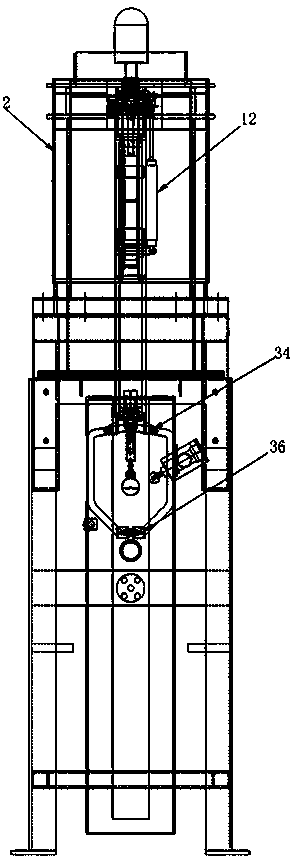
[0037] Such as Figure 1-5 As shown, a packaging machine that automatically takes bags, loads materials, and transfers them includes a frame arranged in a vertical direction, a barrel 1 arranged on the frame, and a discharge nozzle 42 connected to the outlet of the barrel 1. The axis of the barrel 1 is in the vertical direction, and the axis of the discharge nozzle 42 extends transversely. The packaging machine also includes a manipulator device disposed above the discharge nozzle 42 and a receiving device disposed below the discharge nozzle 42 .
[0038] Specifically, the frame includes a supporting frame 2 . The discharge nozzle 42 may in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More