

Double-manipulator fruit and vegetable harvesting robot system and fruit and vegetable harvesting method thereof
A robot system and robot technology, applied to picking machines, harvesters, manipulators, etc., can solve problems such as high labor intensity, long time consumption, and danger, and achieve the effects of reducing labor intensity, reducing operating costs, and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
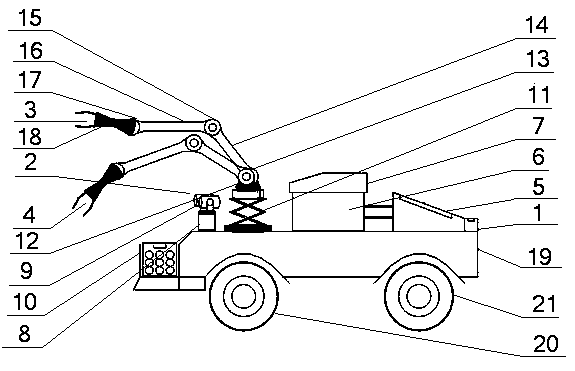
[0026] like figure 1 As shown, the dual-arm fruit and vegetable harvesting robot of the present invention includes a robot mobile platform 1 , a binocular vision system 2 , dual manipulators (namely a first manipulator 3 and a second manipulator 4 ), and a main control computer 5 .
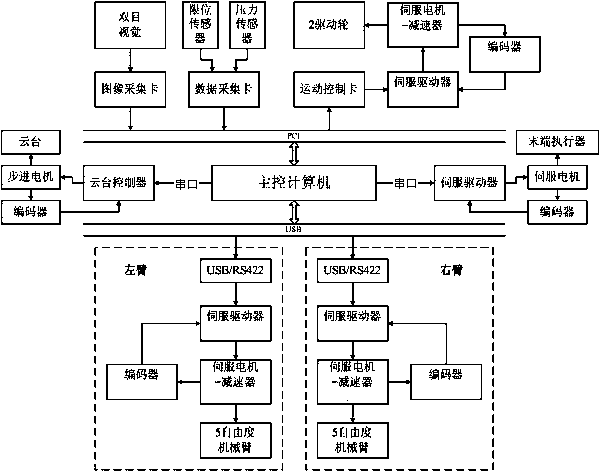
[0027] The robot mobile platform 1 includes a wheeled vehicle body 19 , a power supply 7 , a power control device 6 and a fruit and vegetable collecting device 10 . Among them, the power control equipment includes the controllers for driving the wheeled car body, each joint of the robotic arm, the visual pan-tilt, and the corresponding motors (see figure 2 ). The power supply provides energy for all devices in the system. The fruit and vegetable collecting device is used to place harvested fruits and vegetables; it is movable and can be replaced when it is full. After t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More