

Fruit distinguishing and locating method with laser scanning and machine vision combined
A technology of machine vision and laser scanning, which is applied in the field of agricultural robots, can solve problems such as sensitivity to light conditions, errors, and difficulty in making correct judgments, and achieve the effects of simple and fast methods, accurate identification and determination, real-time performance and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
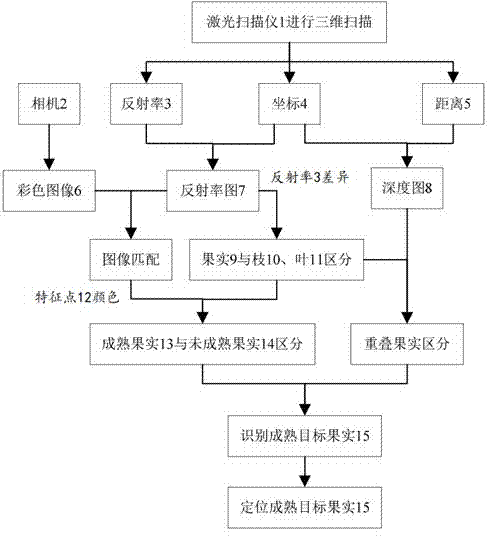
[0019] figure 1 A flow chart of the method of the present invention is shown.
[0020] Taking tomato as an example, the implementation process of the present invention is as follows:
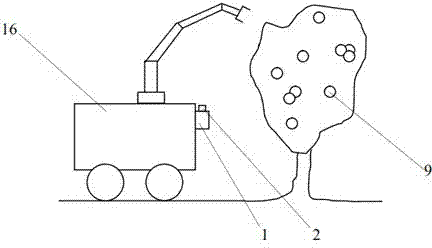
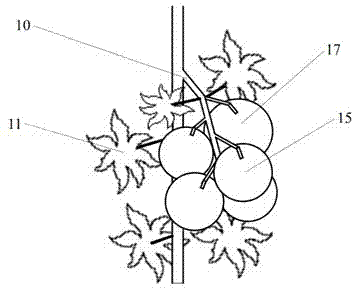
[0021] (1) Laser scanning is not affected by lighting conditions. The laser scanner 1 obtains the reflectivity 3, coordinates 4, and distance 5 information of the scene ahead through three-dimensional scanning. Due to the reflection of tomato fruit 9, tomato branch 10, and tomato leaf 11 There is a significant difference in reflectance, so that a clear outline can be formed in the reflectance figure 7, thereby distinguishing the tomato fruit 9 from the tomato branch 10 and the tomato leaf 11, as shown in image 3 shown;
[0022] (2) In view of the fact that the reflectance 3 of the ripe tomato fruit 13 and the immature toma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More