

Three-dimensional fuzzy control device and method of minimally invasive vascular interventional surgery catheter robot
A technology of interventional surgery and fuzzy control, applied in surgery, medical science, diagnosis, etc., can solve problems such as poor performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The implementation of the present invention will be further described in detail below in conjunction with the accompanying drawings.
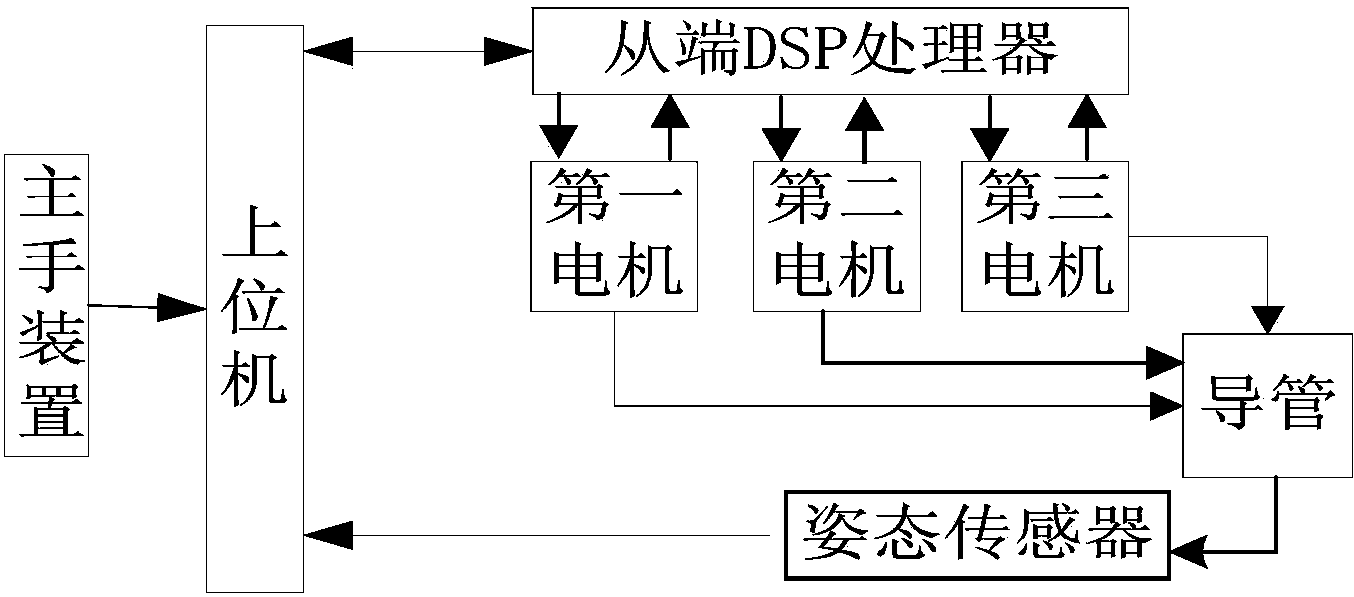
[0053] Such as figure 1 As shown, a three-dimensional fuzzy control device for a catheter robot for minimally invasive vascular interventional surgery includes a main hand device, a host computer, a slave DSP processor, a first motor, a second motor, a third motor and an attitude sensor, wherein the main hand The device is used to set the target position of the catheter end and send the target position to the host computer; when the host computer receives the initial position signal of the catheter end, it is used to calculate and obtain the target position coordinates and the initial position coordinates of the catheter end The deviation between the two; the deviation and the initial attitude information are sent to the slave DSP processor; when the real-time collected catheter end position signal is received, it is used to calculate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More