

Underwater robot three-dimensional path tracking control method based on second-order filter
An underwater robot, second-order filter technology, applied in three-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The specific implementation of the three-dimensional path tracking control method of the underwater robot based on the second-order filter is as follows:
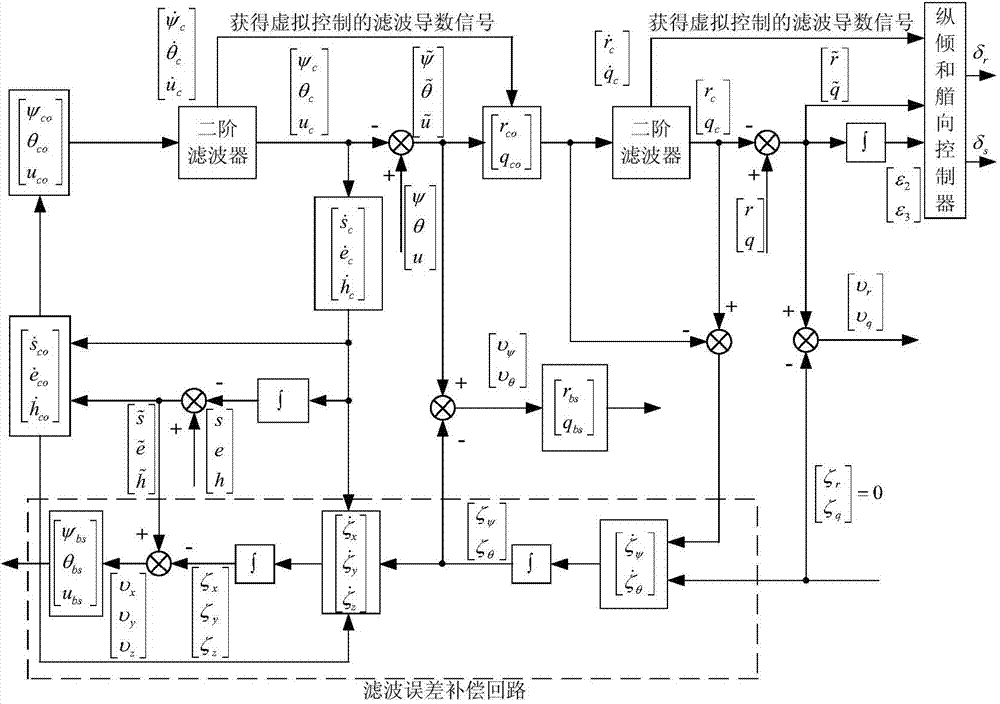
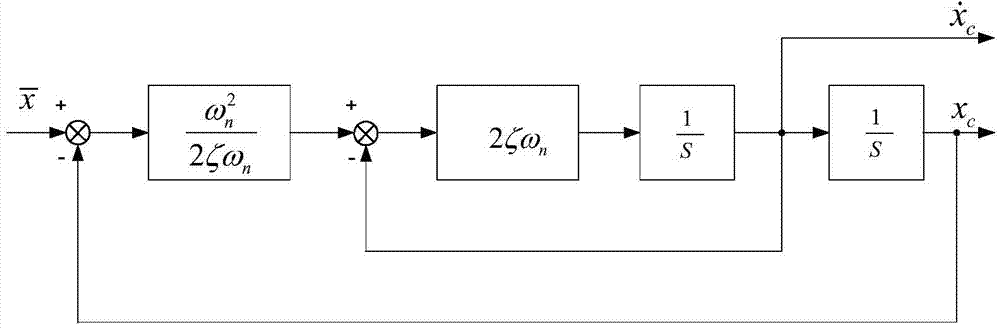
[0081] 1. The figure shows the state signal of the AUV system, the relationship between the virtual control quantity and the filter signal and its derivative value. The forward loop mainly obtains the filter signal and derivative signal of the virtual control through the second-order filter, and the filter error compensation is designed The loop ensures the tracking accuracy of the filter to the input signal.
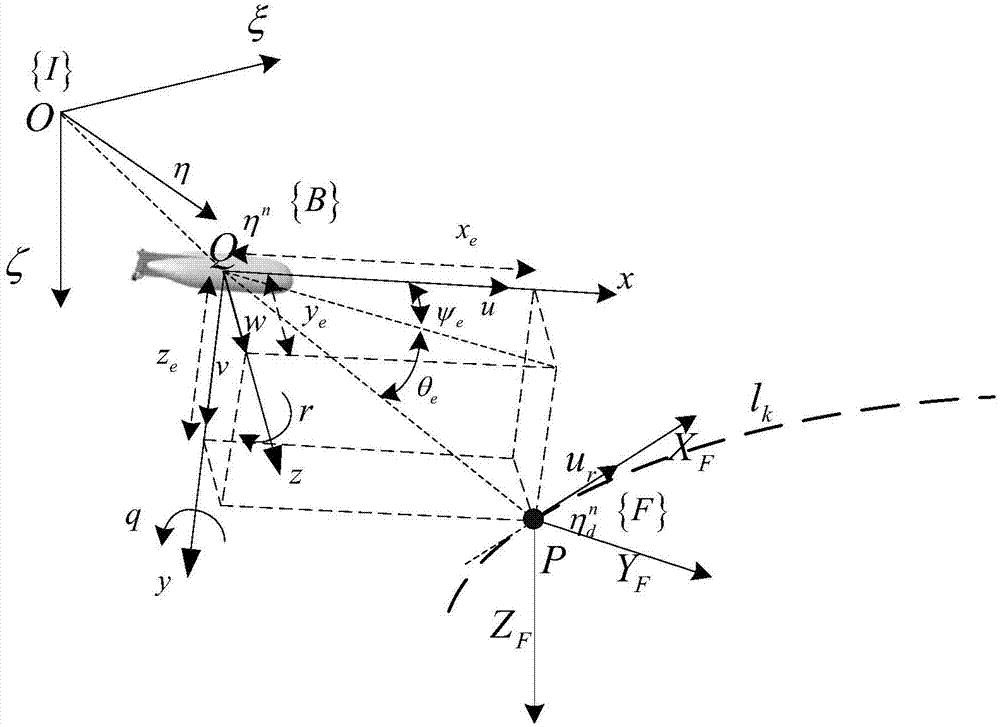
[0082] 2. image 3 is a schematic diagram of the three-dimensional path tracking of the robot, l k is the expected path, {I}, {B} and {F} represent the fixed coordinate system, the robot carrier coordinate system and the Serret-Frenet coordinate system respectively; point P is the expected path l k The virtual guide on , point Q represents the position of the center of mass of the robot, for a given desired ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More