

Ship dynamic positioning control method
A dynamic positioning and control method technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as difficulty in meeting actual production needs, poor dynamic positioning accuracy, etc., achieve low requirements, high positioning accuracy, good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] A kind of ship dynamic positioning control method, it is characterized in that: dynamic positioning control method comprises the following steps
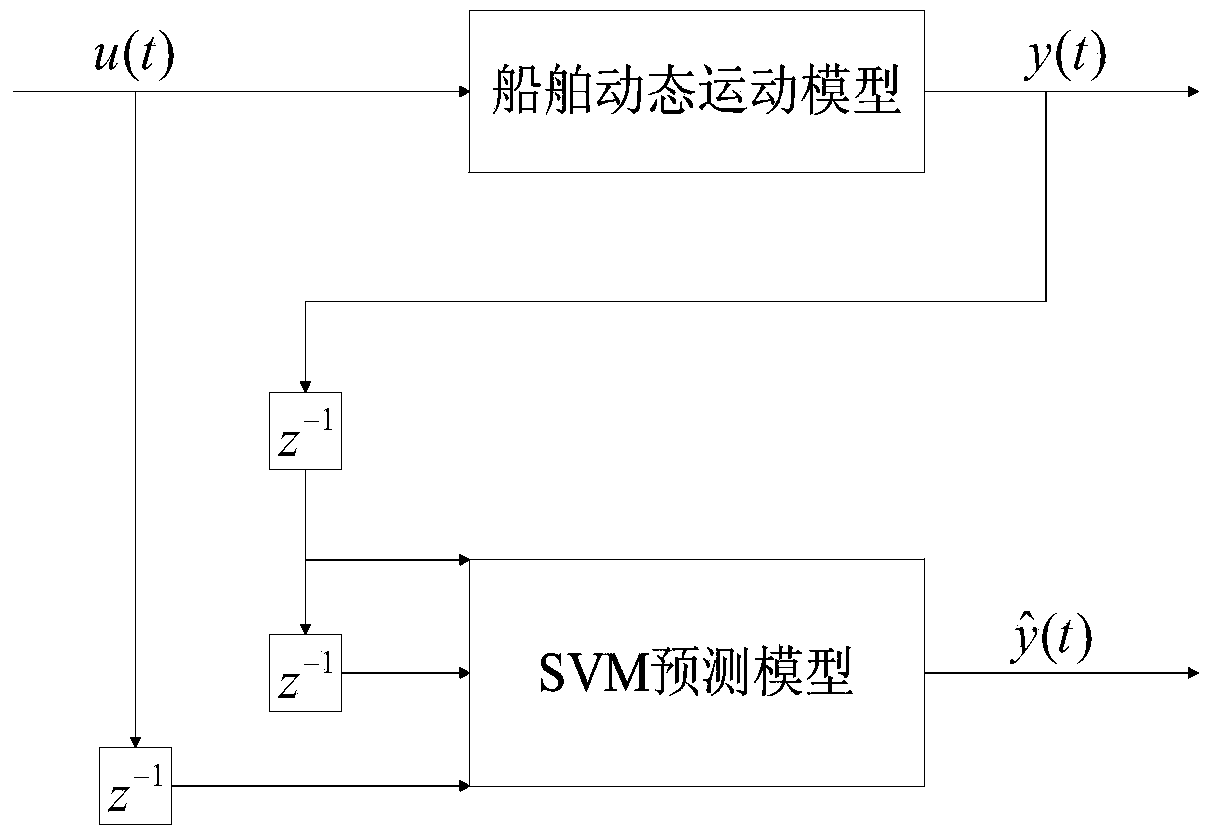
[0035] (1) Establish a support vector machine prediction model: carry out model identification on the dynamic motion model of the ship, and establish a support vector machine prediction model;
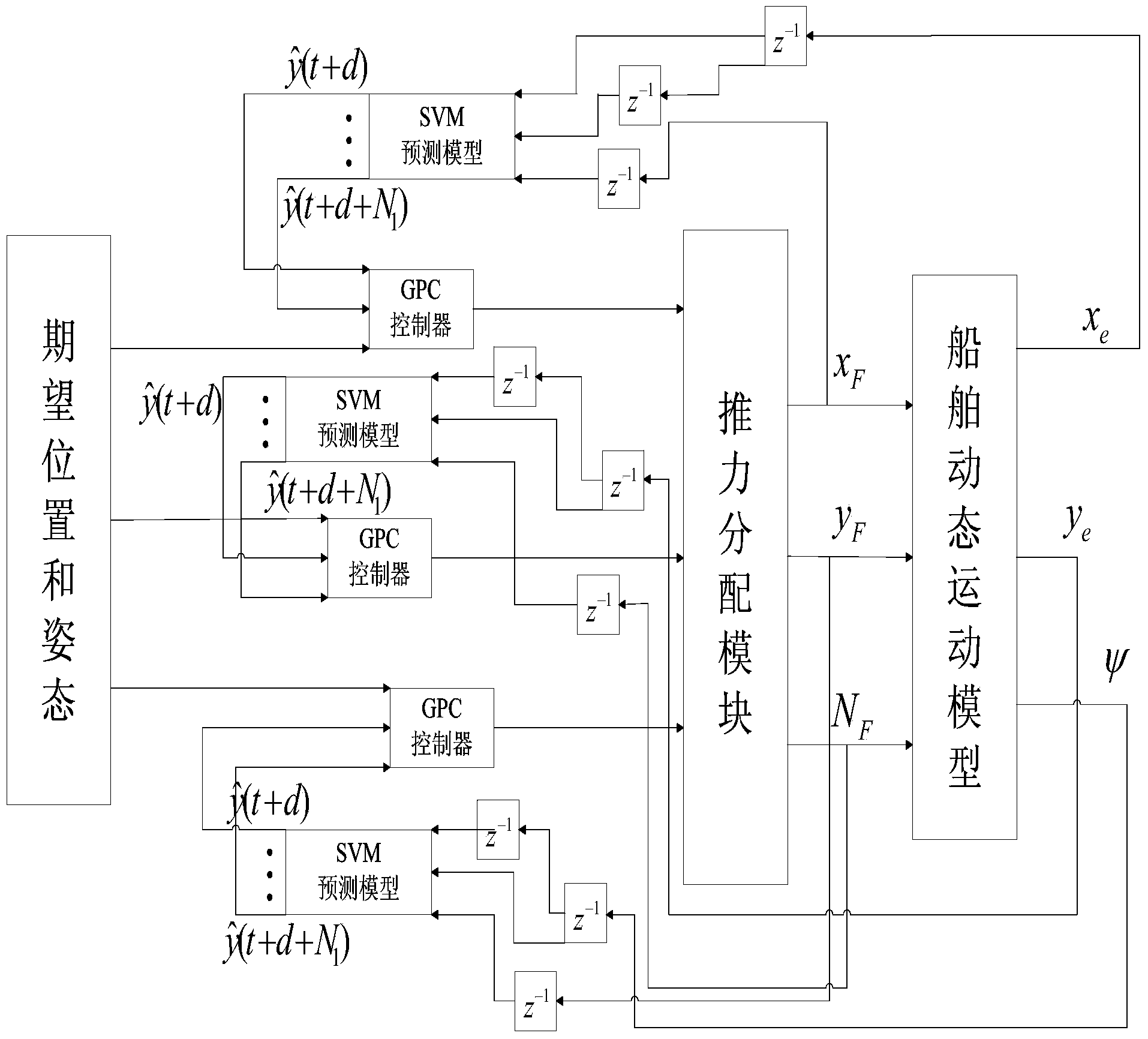
[0036] (2) Expected position and attitude given predictive control: take the expected position and attitude as the three given directions of surge, sway and yaw of the ship dynamic positioning system, and embed three support vector machine prediction models into three The generalized predictive controller is used as the predictive model of the three generalized predictive controllers, and the three references are respectively input into the three generalized predictive controllers to control the surge, sway and yaw motions respectively;
[0037] (3) Predictive control positioning: Three generalized predictive controllers apply the thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More