

Asymmetrical two-rotation-one-translation three-degree-of-freedom parallel mechanism with two continuous shafts
An asymmetric, free-degree technology, applied in the field of robotics, can solve problems such as processing and manufacturing difficulties, and achieve the effects of easy processing and manufacturing, simple kinematics model, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
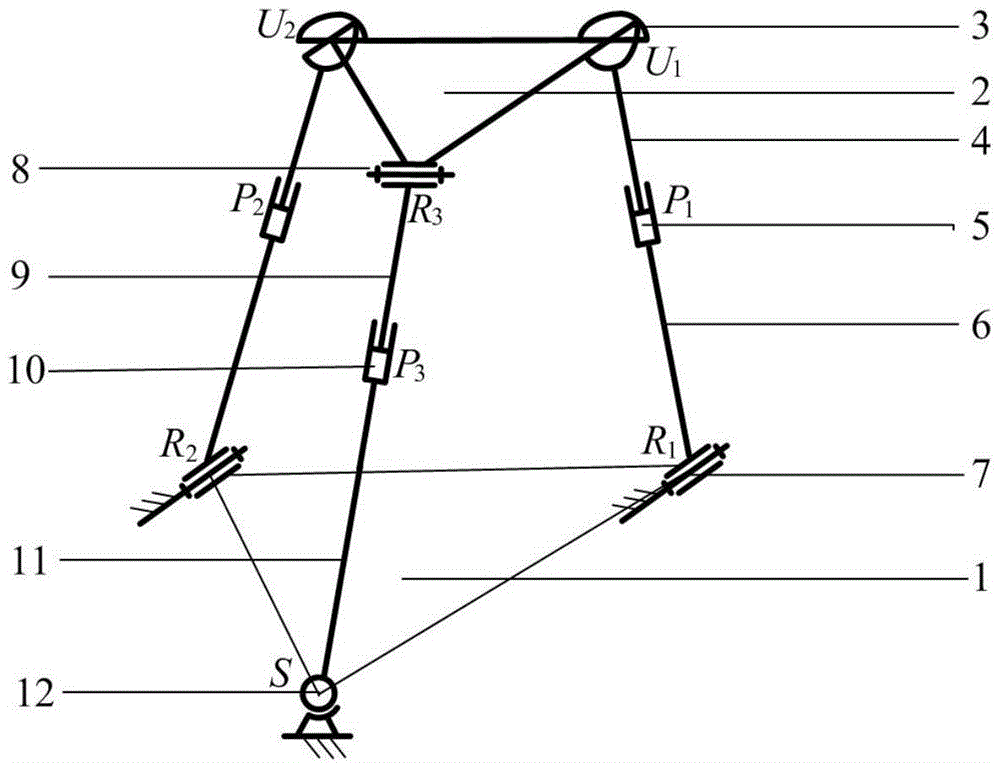
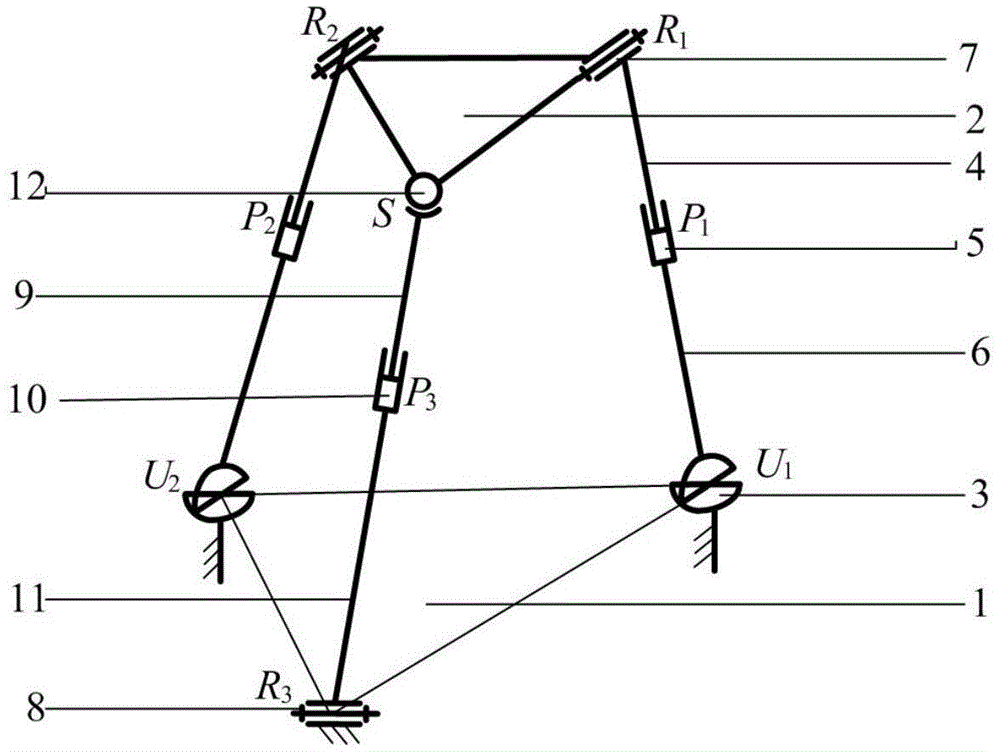
[0011] exist figure 1 In the schematic diagram of the asymmetric two-rotation-one-shift three-degree-of-freedom parallel mechanism with two continuous shafts shown, the fixed platform 1 and the moving platform 2 form an isosceles triangle, and three branch chains connect the moving platform and the fixed platform. Among the three branch chains The first branch chain and the second branch chain have the same structure, one end of the upper link 4 in the two branch chains is connected to the moving platform through the Hooke hinge 3, and the other end of the upper link is connected to the lower link through the moving pair 5 6 is connected at one end, and the other end of the lower connecting rod is connected with the fixed platform through the rotating pair 7; one end of the upper connecting rod 9 in the third branch chain is connected with the moving platform through the rotating pair 8, and the other end of the upper connecting rod The moving pair 10 is connected with one end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More