

Transverse twin-pillar-supported superstructure for unmanned surface vehicles
A technology for superstructures and unmanned boats, applied in superstructures, ships, ship construction, etc., can solve the problems of poor stability, small displacement and scale, and poor navigation economy, so as to improve longitudinal stability and anti-overturning ability, the effect of improving navigational performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
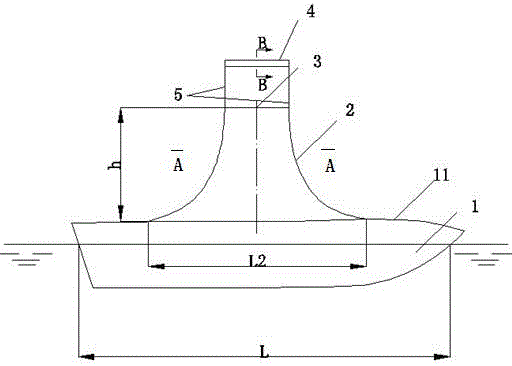
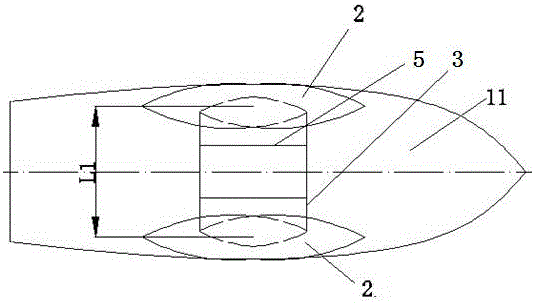
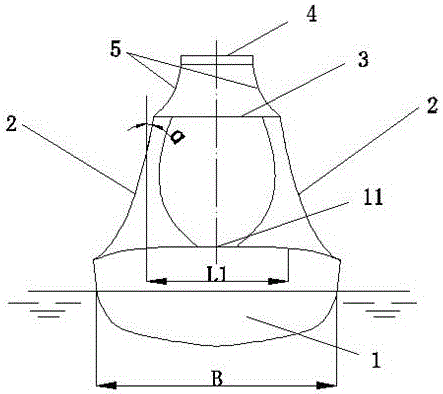
[0016] see figure 1 , 2 , 3, the surface unmanned boat includes the main hull 1, the design waterline length of the main hull 1 is L, and the design waterline width is B.
[0017] There are two fully enclosed pillars 2 on the deck 11 of the main hull 1, which are made of composite light materials such as glass fiber reinforced plastics or aluminum alloys, and all the remaining spaces in the interior are filled with light materials. Two pillars 2 are vertically arranged above the deck 11, relative to the main hull 1, the two pillars 2 are symmetrical in the left and right width direction, and their center is located at the midship part of the main hull 1 or at the front of the midship (1 / 8-1 / 6) At position L, the bottom and sides of the two pillars 2 are connected smoothly and seamlessly to the deck 11, and the stress concentration at the connection part should be avoided during connection. The contour lines of the front and rear edges of the two pillars 2 from bottom to top...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More