

Geometric path tracking method for mobile robot with uncertain center of mass
A mobile robot and geometric path technology, applied in the field of robot control, can solve problems such as uncertain center of mass position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with accompanying drawing.
[0019] 1. The establishment of the motion model of the mobile robot with uncertain center of mass position.
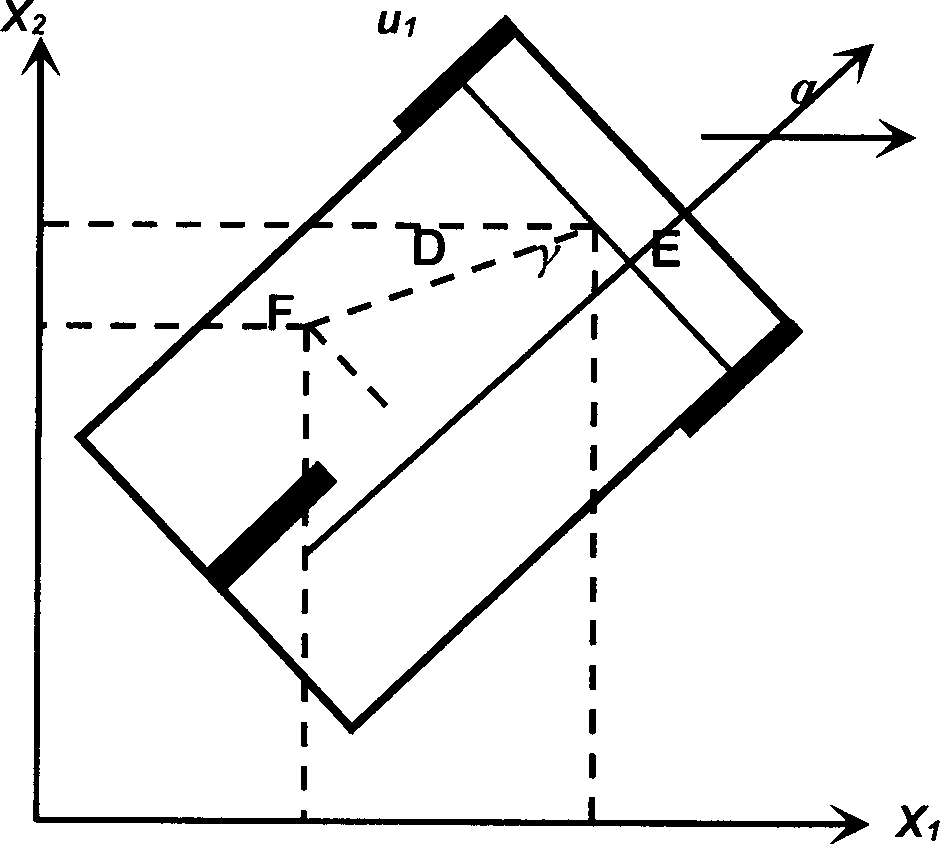
[0020] figure 1 , the distance between the two wheels is d, P is the midpoint of the axis of the two wheels, u 1 is the forward speed of point P, x 3 Indicates the relative axis x of the mobile robot 1 the corner of is the angular velocity of the robot, u 1 and u 2 for the control amount. C is the center of mass of the robot. Due to load and other factors, the center of mass C and P do not coincide. Let L be the distance between point C and point P. When the center of mass is located in the front half of the two axles, L is positive, otherwise it is negative. L shown in the figure is negative. γ represents the angle of the center of mass C of the robot from the central axis, assuming
[0021] γ∈(-π / 2, π / 2). The kinematics model of the mobile robot with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More