

SURF (speeded up robust feature) algorithm based localization method and robot
A robot and algorithm technology, applied in instruments, manipulators, program-controlled manipulators, etc., can solve problems such as high computational complexity, complex visual information, and difficulty in realizing real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
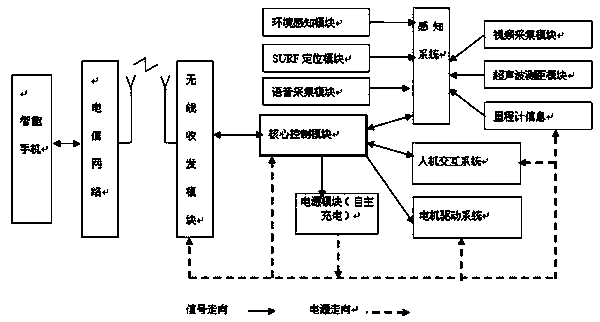
[0020] Such as figure 1 As shown, the present invention mainly relates to an intelligent robot in a home environment, which is an autonomous mobile robot with environmental awareness, simultaneous positioning and map creation, and obstacle avoidance path planning. It includes a perception system, a core control module, a human-computer interaction system, and a motor drive system. The perception system accepts audio and / or video signals input through various chann...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More