

Gyroscope assisted positioning method
A technology for assisting positioning and gyroscopes, which is applied in directions such as navigation and navigation calculation tools through speed/acceleration measurement, and can solve problems such as increased cumulative error and poor experience.
Inactive Publication Date: 2014-03-19
南京北斗城际在线信息股份有限公司
View PDF5 Cites 15 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Although the existing gyroscope-assisted navigation method has made it possible to point and locate in the air, because the obtained positioning position is only a relative value relative to the previous positioning, there is a certain deviation in the directivity. When the long-term deviation cannot be compensated , the deviation will be accumulated to a certain extent, so that the experience is getting worse and worse. In some specific occasions, it cannot fully meet the needs. In addition, the traditional gyroscope-assisted navigation is based on the last position point for navigation. In the process, the cumulative error will continue to increase due to the increase of time.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0015] The gyroscope-assisted positioning method comprises the following steps:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
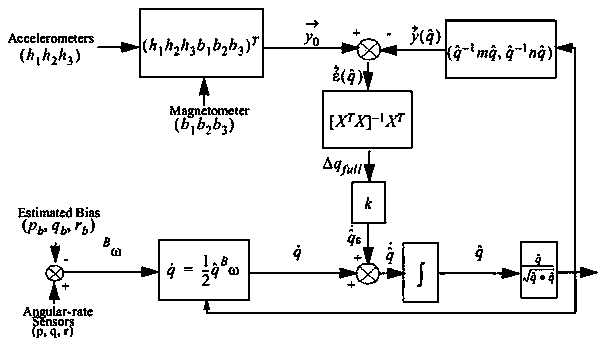
The invention discloses a gyroscope assisted positioning method. The method comprises the following steps: step one, measurement of attitude angle: individually subjecting a measured value of an accelerometer and a measured value of a magnetic sensor to the Gauss-Newton iteration so as to obtain an attitude error speed, obtaining an attitude quaternion speed by using a gyroscope through a quaternion differential equation, adding the attitude error speed and the attitude quaternion speed together so as to obtain an attitude quaternion; step two, obtaining an initial point: carrying out track calculation according to the data of the accelerometer and the gyroscope chip so as to improve the track period to the data period of an inert measuring unit; step three, calculating the speed and the displacement distance; step four, calculating the position point, and step five, correcting the position. The method effectively solves the problems of gyroscope drift, carrier linear acceleration and interference of the surrounding local magnets, then carries out project correction on the positioning result according to the road data, and calculates the next position point by utilizing the correction result, and thus effectively reduces the accumulated error.
Description
technical field [0001] The invention relates to an auxiliary positioning method, in particular to a shedding and auxiliary positioning method. Background technique [0002] The existing gyroscope-assisted navigation method adopts the gyroscope positioning method, which is designed based on the principle of angular velocity detection. Through a series of calculations, the obtained positioning position is a relative value relative to the previous positioning. Although the existing gyroscope-assisted navigation method has made it possible to point and locate in the air, because the obtained positioning position is only a relative value relative to the previous positioning, there is a certain deviation in the directivity. When the long-term deviation cannot be compensated , the deviation will be accumulated to a certain extent, so that the experience is getting worse and worse. In some specific occasions, it cannot fully meet the needs. In addition, the traditional gyroscope-ass...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01C21/16
CPCG01C21/16G01C21/20
Inventor闫智勇李建平
Owner南京北斗城际在线信息股份有限公司