

Unicycle robot with function of self-balancing realization
A robot and unicycle technology, applied in the field of intelligent robots, can solve the problems of not considering the influence of turning balance control, weak ability of complex variable environment, low control accuracy, etc., to improve flexibility, small turning radius, and high control sensitivity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to more clearly illustrate the technical characteristics of this scheme, the following will describe this scheme in detail in conjunction with the accompanying drawings and specific implementation methods:
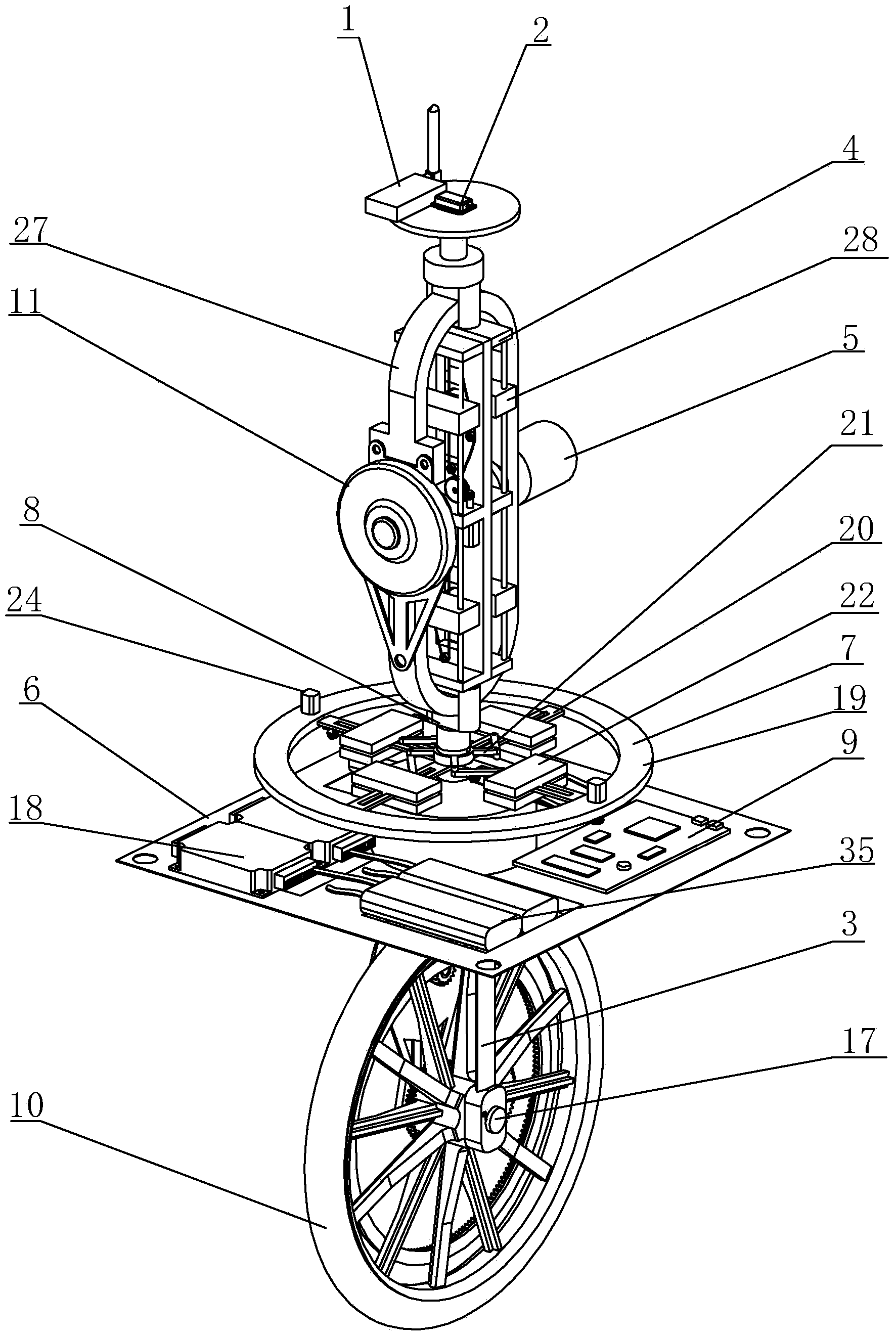
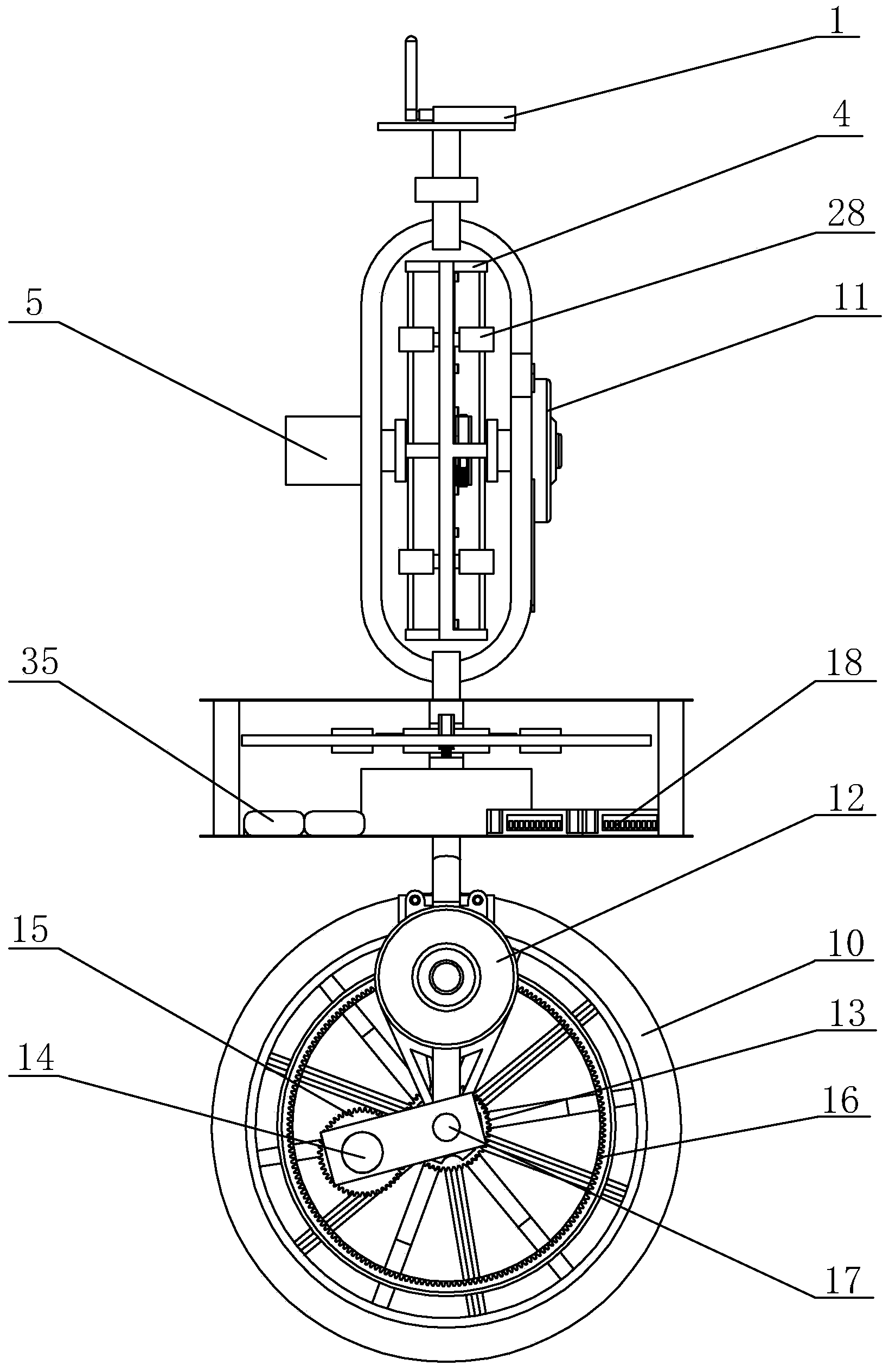
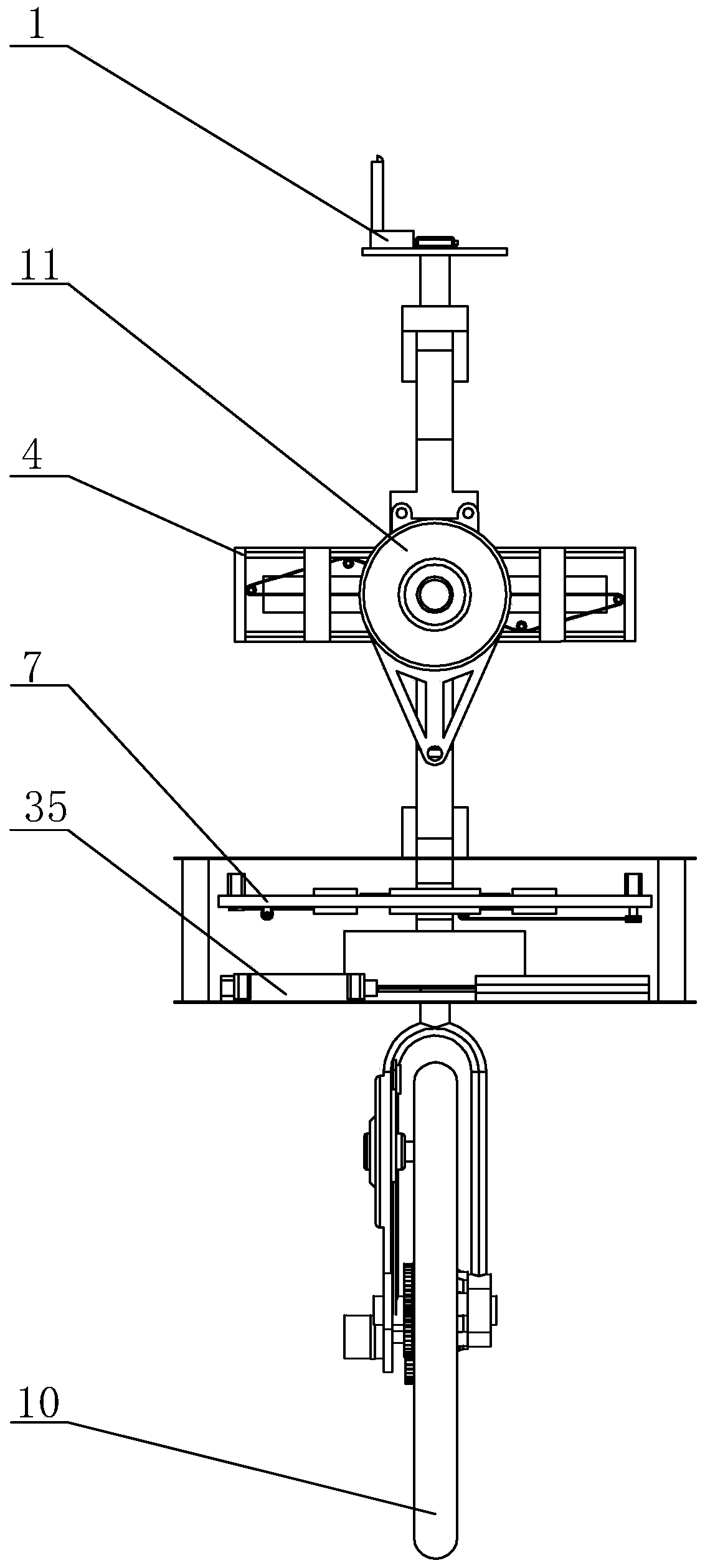
[0040] Such as figure 1 , 2As shown, a self-balancing unicycle robot of the present invention is an aluminum alloy frame, including a wireless module 1, a gyroscope 2, a motion controller 9, a servo driver 18, a frame 3, a frame plate 6, and a battery pack 35 , swing bar 4, waist plate 7 and single wheel 10; said servo drive 18 comprises a swing bar servo drive, waist plate servo drive, single wheel servo drive, servo drive 18, motion controller 9, and battery pack 35 are fixedly connected to On the frame plate 6. The waist disc 7 is connected to the waist disc servo driver, the single wheel 10 is connected to the single wheel servo driver, the pendulum rod servo driver, the waist disc servo driver and the single wheel servo driver are respectively conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More