

Smart quadruped robot with flexible waist
A quadruped robot and flexible waist technology, applied in the field of detection robots, can solve the problems of reducing the turning radius of travel, reducing the moment of inertia of the robot's legs, and low energy utilization, and achieve the effect of reducing the turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below with reference to the accompanying drawings.
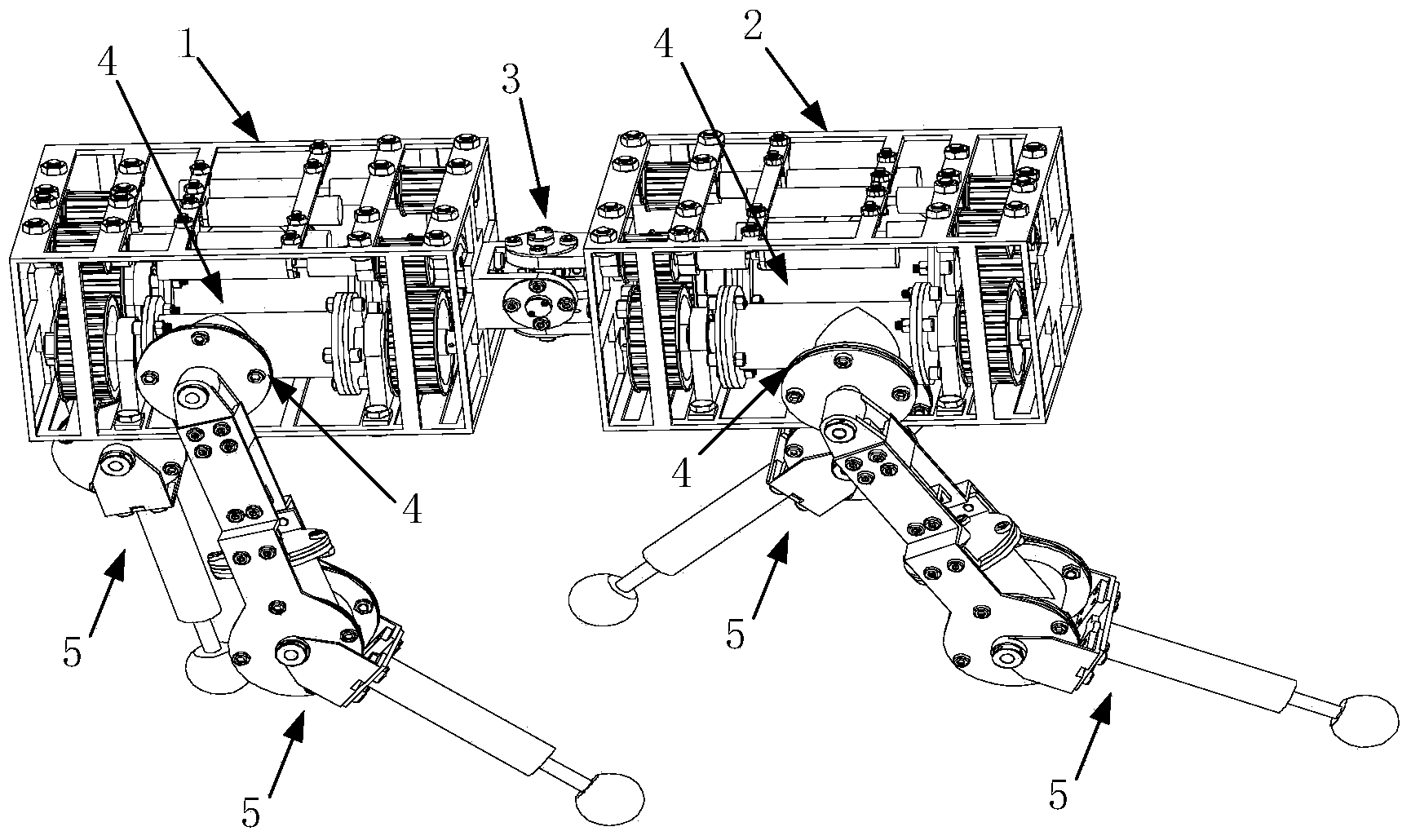
[0049] The quadruped robot of the present invention includes a front body 1, a rear body 2, a waist mechanism 3, a crotch mechanism 4 and a leg mechanism 5, such as figure 1 shown.
[0050] Among them, the front body 1 and the rear body 2 have the same structure, both of which are rectangular frame structures;
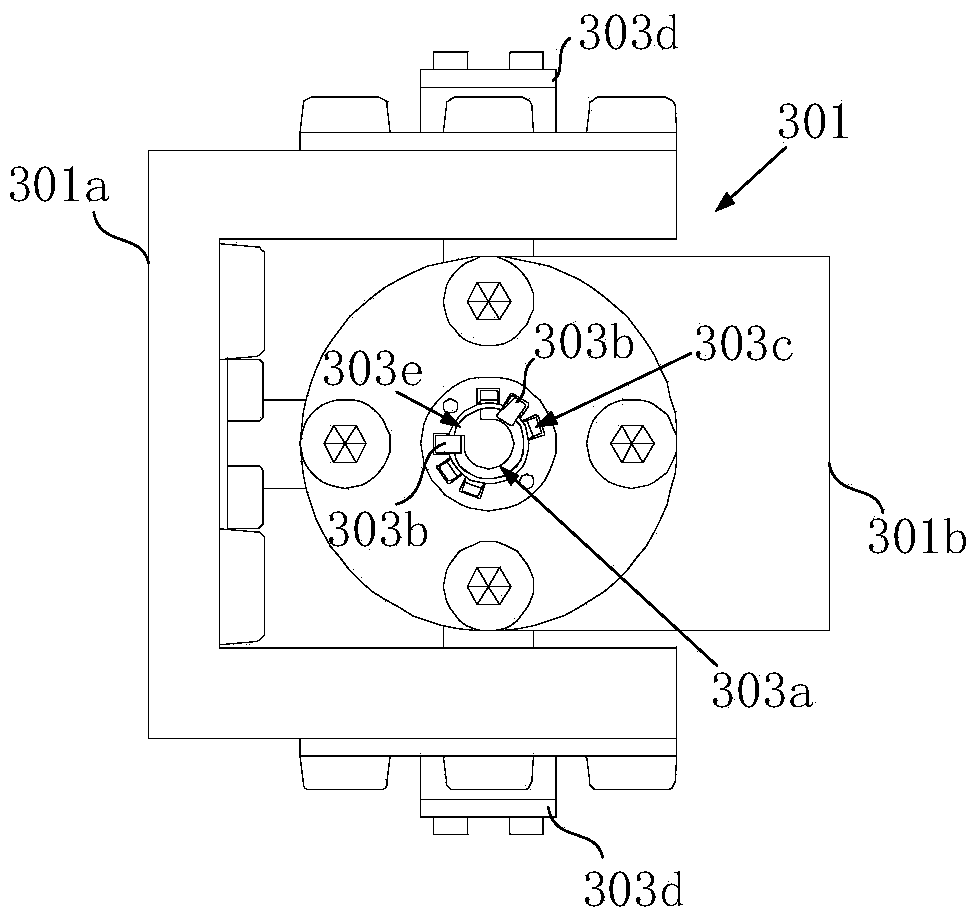
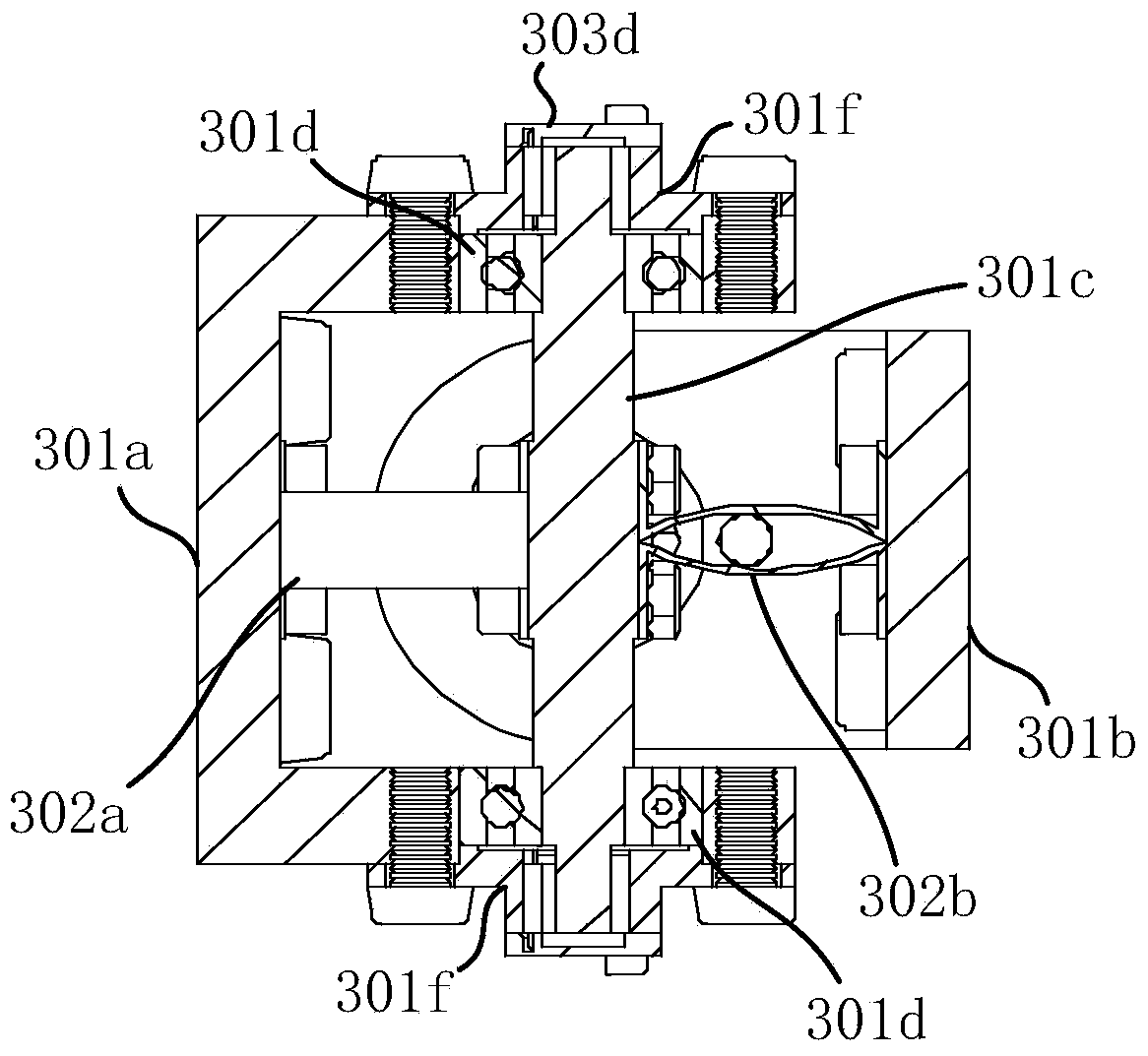
[0051] The waist mechanism 3 is composed of a Hook hinge 301, an elastic structure 302 and a limiting structure 303, and has two degrees of freedom, such as Figure 2a , 2b , 2c; wherein, the Hook hinge 301 includes a U-shaped hinge seat A301a, a U-shaped hinge seat B301b, a cross center shaft 301c, a pair of deep groove ball bearings A301d, a pair of deep groove ball bearings B301e, a pair of flange type A pair of bearing caps A301f, a pair of flanged bearing caps B301g. The mounting surfaces of the U-shaped hinge seat A301a and the U-shaped hinge seat B301b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More