

Spherical underwater robot based on vector advancing
An underwater robot and vector propulsion technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems that affect the stability of navigation speed, cannot guarantee the forward rotation state of the propeller, and increase the cost of robots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following examples describe the present invention in more detail.
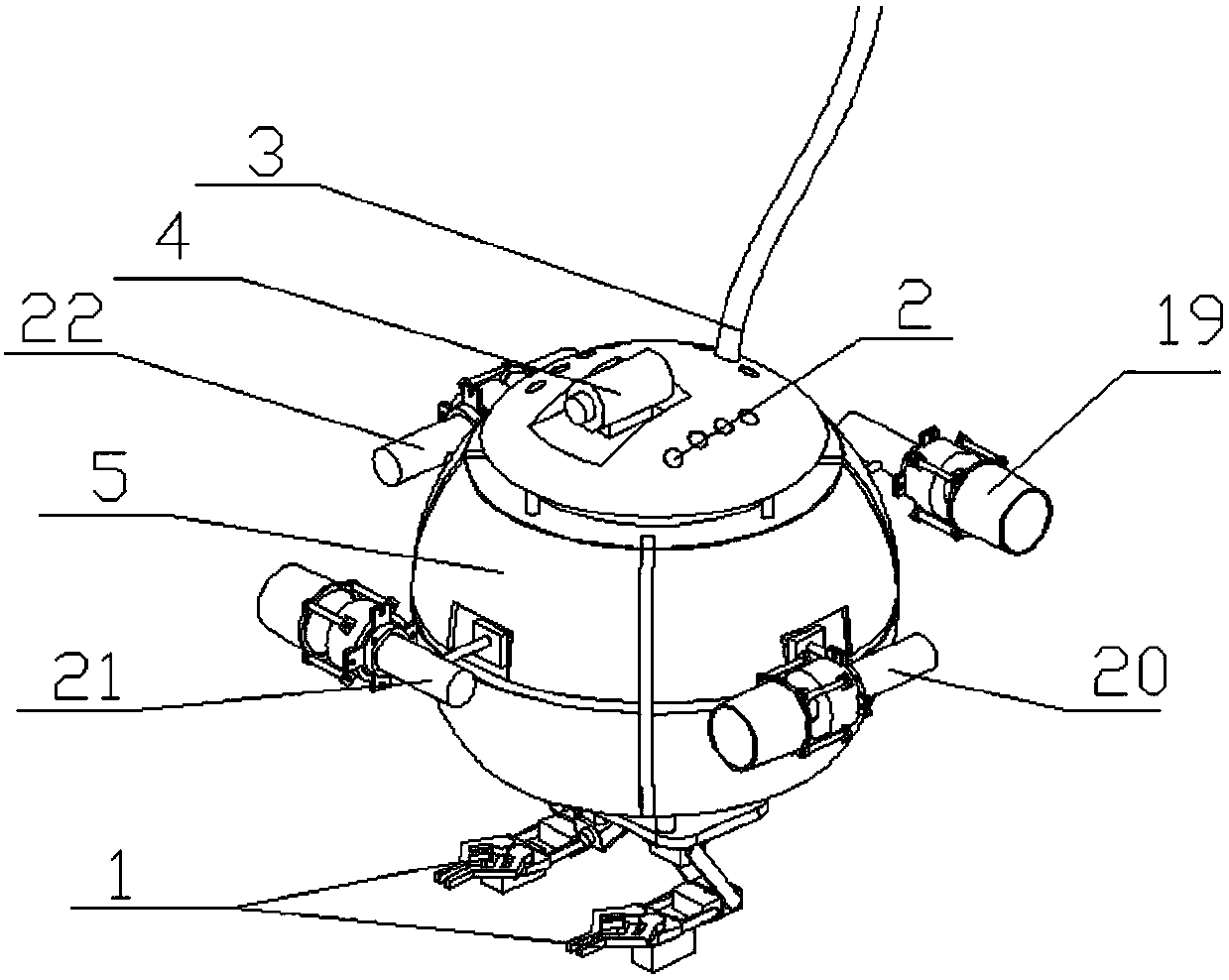
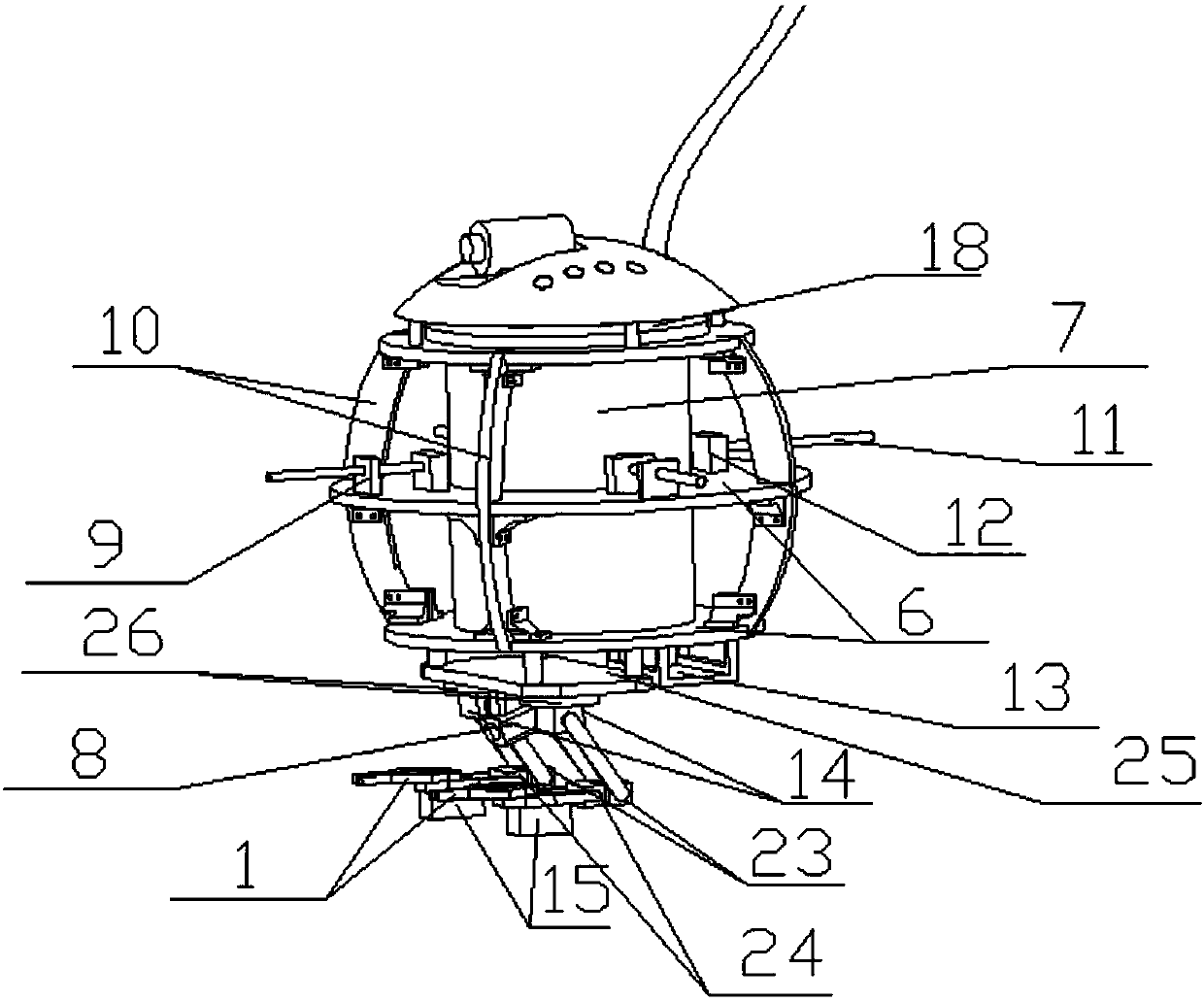
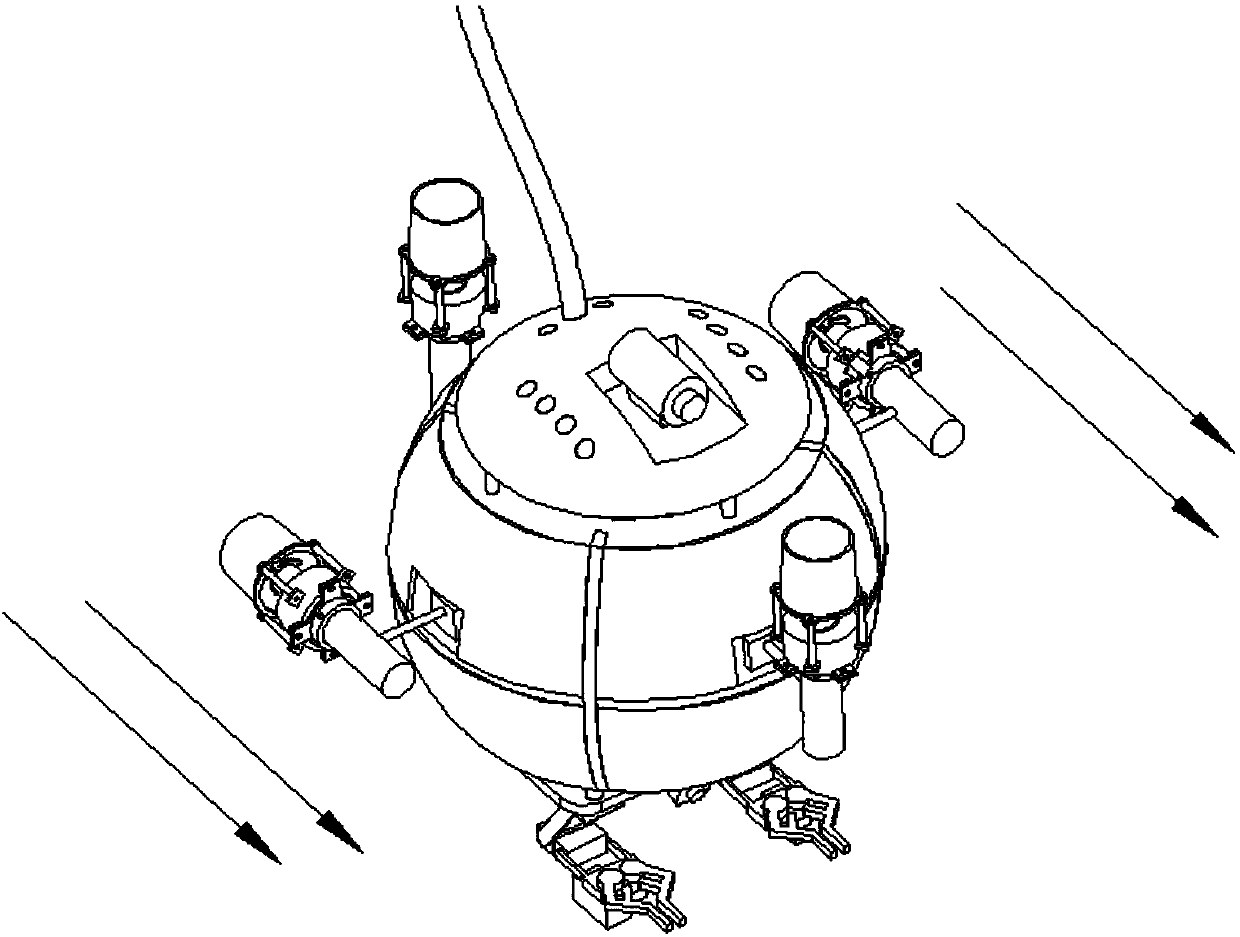
[0035] combine figure 1 , figure 2 , Figure 12 with Figure 13 , in the spherical underwater machine based on vector propulsion of the present invention, 1 is the manipulator clamp, 2 is the hole left for connecting the component cables to the inside of the pressure chamber, 3 is the optical fiber cable, 4 is the top camera, and 5 is the underwater The light shell of the robot, 6 is the horizontal skeleton of the underwater robot, 7 is the pressure chamber, 8 is the bottom camera, 9 is the bearing, 10 is the longitudinal skeleton of the underwater robot, 11 is the shaft connecting the propeller, and 12 is the rudder for vector propulsion 13 is a container for loading counterweights designed to balance the weight of the manipulator, 14 is a steering gear for controlling the movement of the manipulator, 15 is a steering gear for opening and closing the gripper of the manipulator, 16 is for placin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More