

Unmanned aerial vehicle route planning method based on Dubins route and sparse A* searching
A track planning and unmanned aerial vehicle technology, applied in the direction of position/direction control, vehicle position/route/altitude control, non-electric variable control, etc., can solve problems affecting the efficiency of track planning, reduce time-consuming, improve Efficiency, the effect of reducing the number of nodes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0078] (1) Example of UAV track planning in barrier-free environment
[0079] The relevant parameters in the example are: UAV flight speed V is 100m / s, the minimum turning radius R is 1km, the shortest direct flight distance (that is, the step size d) is 200m, the maximum turning angle is 11.26°, and the fan shape when the node expands The number of space divisions N is set to 5.
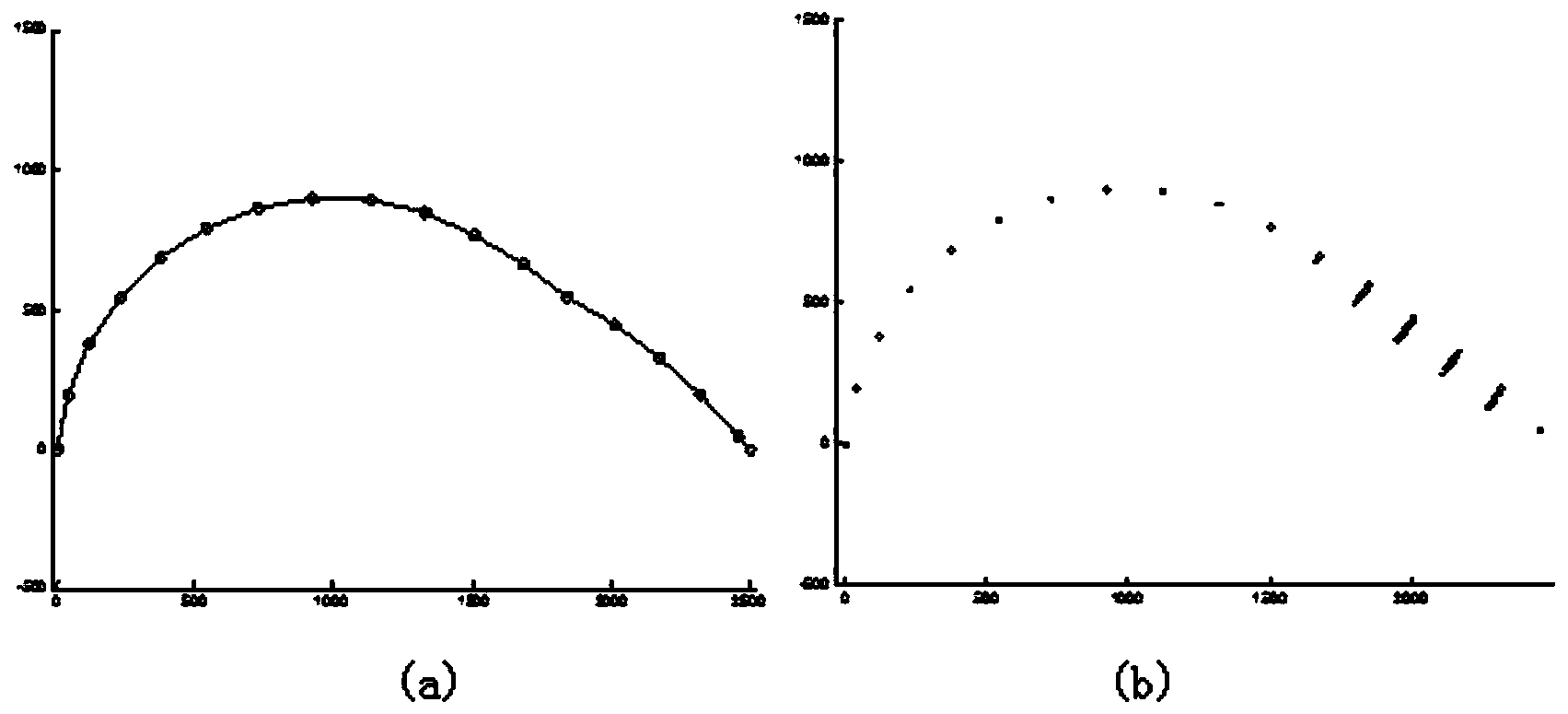
[0080] First, initialize the environment of UAV track planning, including setting the initial position, initial direction angle and target position of the UAV. In this example, the starting point of the UAV is at the origin (0, 0), and the initial flight direction angle is 90°, the coordinates of the target point are (2500, 0).
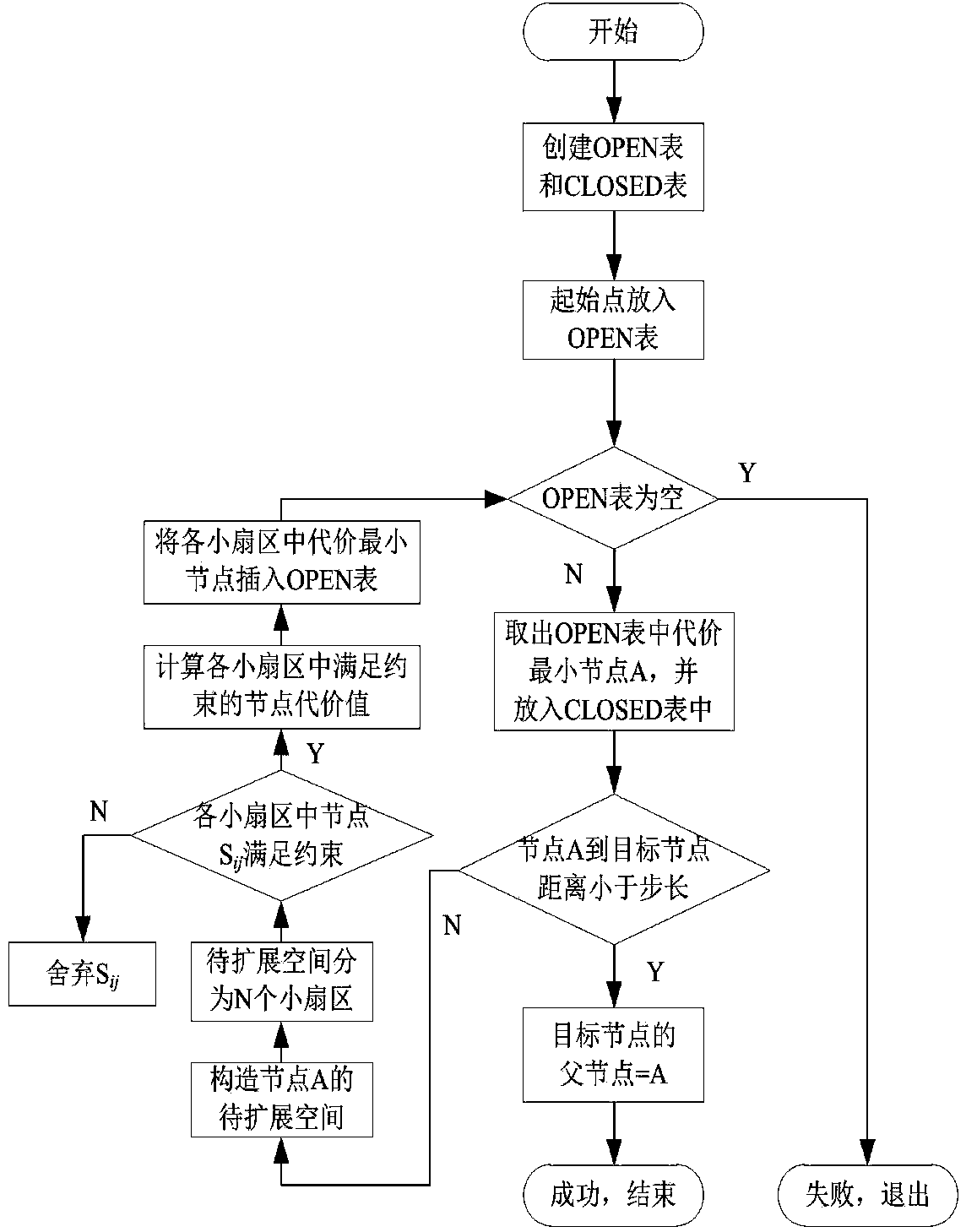
[0081] Then, use the fast track planning method based on Dubins path and sparse A* search algorithm described in the present invention to plan the optimal track from the starting point to the target for the unmanned aerial vehicle, the track result of planning is as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More