ROI (Region of Interest) extraction method of ground target of unmanned aerial vehicle
A target and machine-to-machine technology, which is applied in the field of UAV-to-ground target ROI extraction, can solve the problems of large feature matching search range, carrier jitter, high computational complexity, etc., to improve pertinence and efficiency, and improve environmental adaptation performance, high environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
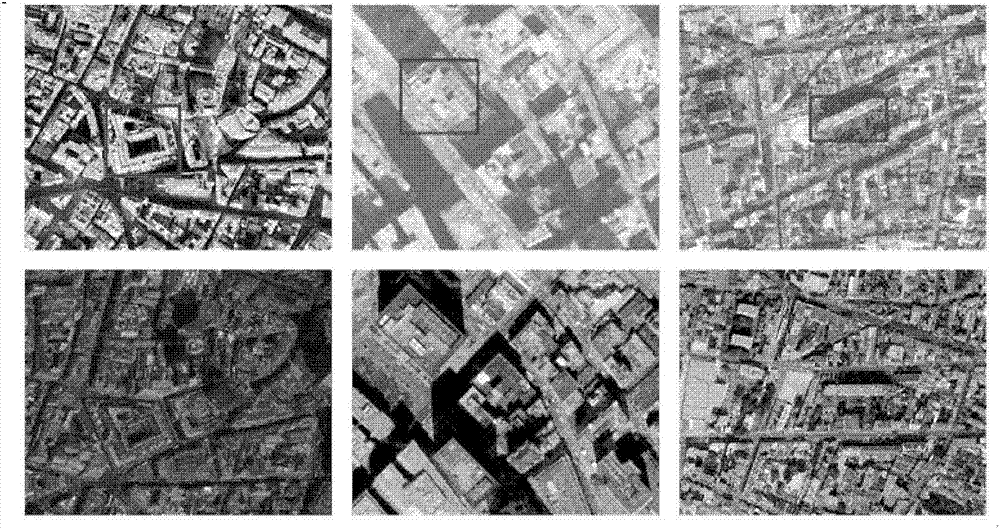
[0020] The present invention will study a method for quickly detecting a specific target from a real-time image for the situation that only a single reference image is provided. figure 1 A typical application example of specific target detection is shown, where the upper row is the reference image, and the red frame is the specific target area to be detected; the lower row is the real-time image to be processed. In the present invention, the specific target refers to figure 1 The typical area marked by the rectangular box in the upper row of reference images is also called the target area. We will take the center of the target as the center and an area 4*4 times the size of the target area as the associated environment a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More