

Multi-sensor time synchronization method and system for UAV power inspection
A technology of time synchronization system and power inspection, which is applied in the field of power grid, can solve the problems of complex implementation and poor synchronization effect, and achieve good synchronization effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below according to the drawings and embodiments. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
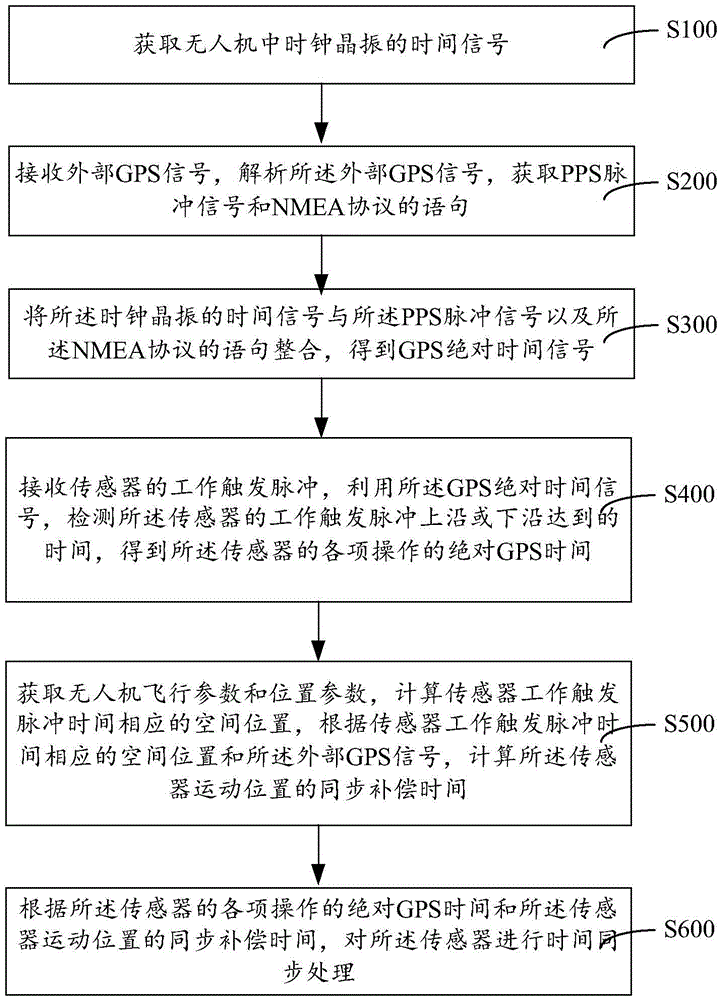
[0023] Such as figure 1 As shown, a multi-sensor time synchronization method for unmanned aerial vehicle power inspection, including steps:
[0024] S100: Obtain the time signal of the clock crystal oscillator in the drone.
[0025] The time signal of the clock crystal oscillator in the drone mentioned here can be understood as a time signal carried by the drone itself. This time signal is a time signal generated by a certain clock crystal oscillator module. The time signal of the clock crystal oscillator in the drone can be understood It is the UAV local time signal.
[0026] S200: Receive an external GPS sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More