Comprehensive planning method for paths of vehicles for picking up goods
A comprehensive planning and vehicle technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve the problems of unformed planning scheme, inability to select transport vehicles, and low vehicle loading rate, so as to improve vehicle loading rate, The effect of reducing transportation distance and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
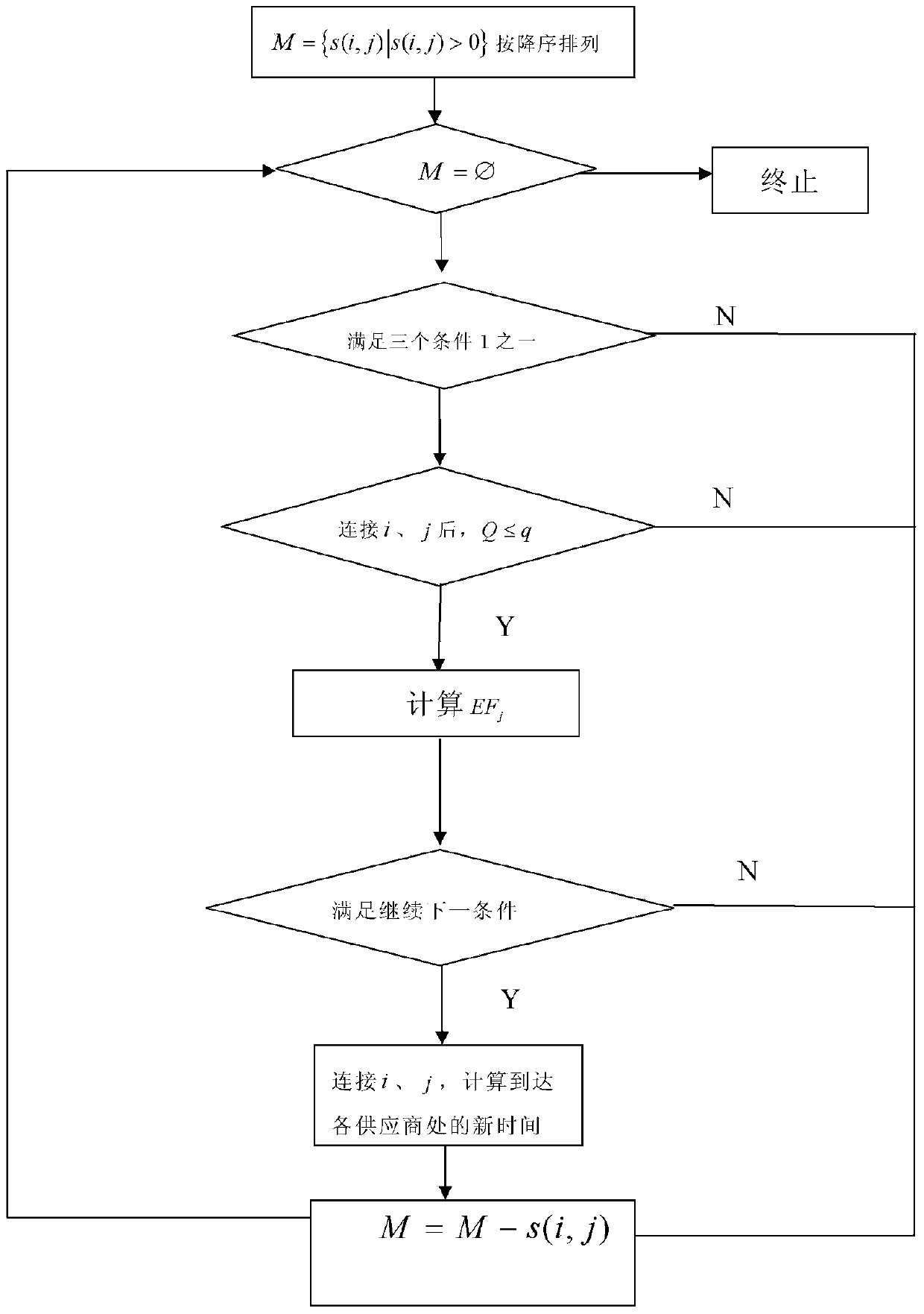
[0031] For better illustrating method of the present invention, carry out following definition: EF j After connecting the line where point i and point j are located, the time when the vehicle arrives at pick-up point j is delayed or advanced compared to the time when the vehicle arrives at point j on the original route. ET represents the earliest arrival time of the pick-up vehicle, and LT represents the latest arrival time of the pick-up vehicle. Then there are:
[0032] EF j =s i +T i +t ij -s j
[0033] Apparently there is, when EF j < 0, the task time for the vehicle to reach the pick-up point j is advanced;
[0034] EF j >0, the task time delay for the vehicle to reach the pick-up point j;
[0035] When EF j = 0, the task time for the vehicle to reach the pick-up point j remains unchanged.
[0036] For the convenience of explai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More