

Real-time and accurate pose estimation method based on fiber-optic gyroscope, speed sensor and GPS
A speed sensor and fiber optic gyroscope technology, which is used in instruments, satellite radio beacon positioning systems, measuring devices, etc., to achieve the effects of small environmental impact, elimination of random noise, and correction of accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with accompanying drawing.
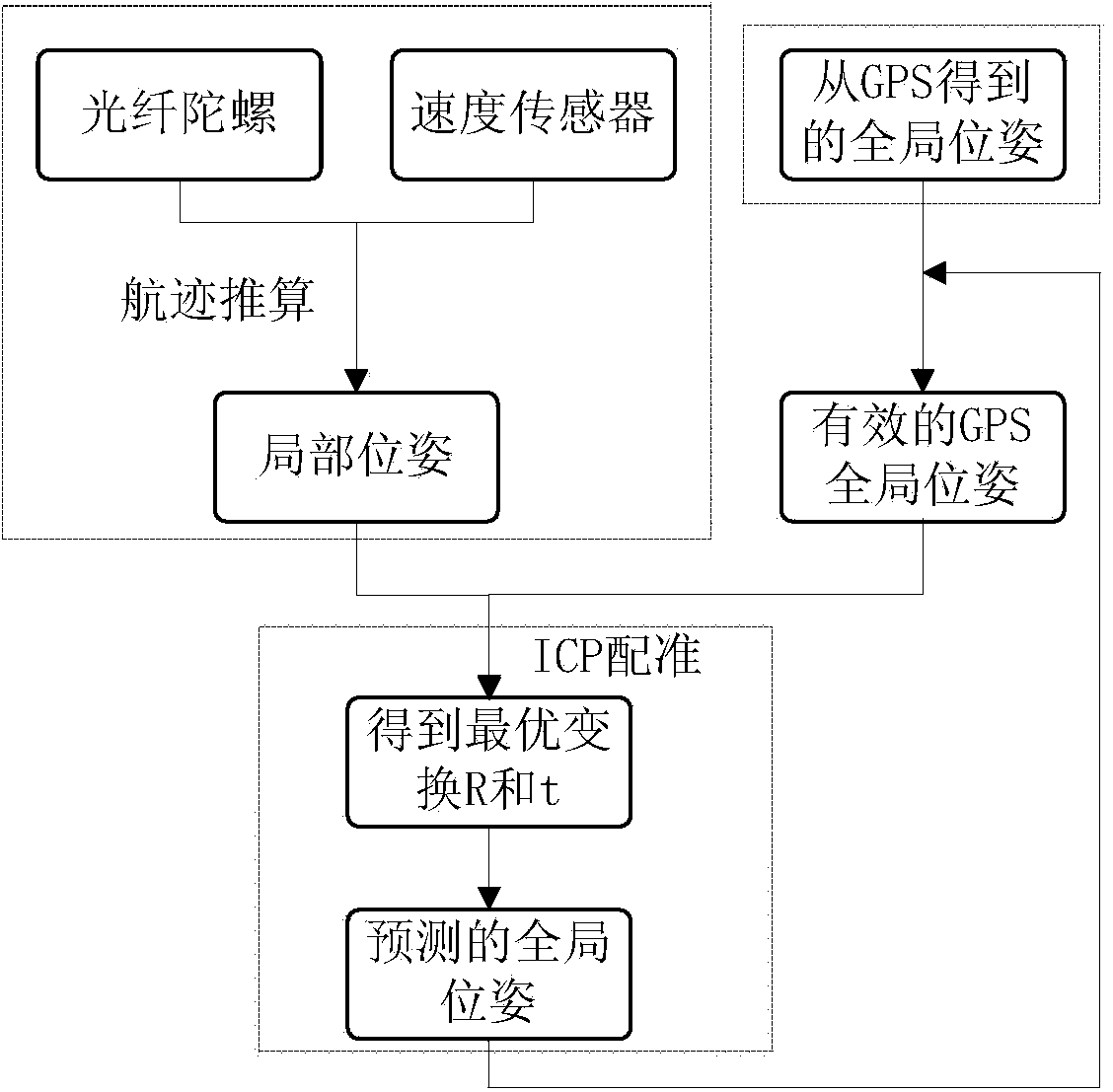
[0044] see figure 1 , the real-time accurate pose estimation method based on fiber optic gyroscope, speed sensor and GPS is divided into three parts, including the following steps:
[0045] 1) The local pose is obtained by the fiber optic gyroscope and the speed sensor. The specific steps are as follows:
[0046] (1a) Gyro output heading angle θ information;
[0047] (1b) Parse the real-time front wheel speed and front wheel angle from the UDP (User Data Protocol) packet to obtain the speed information;
[0048] (1c) Calculate the relative displacement according to the velocity information of the two frames before and after;
[0049] (1d) Real-time dead reckoning to obtain local position information;
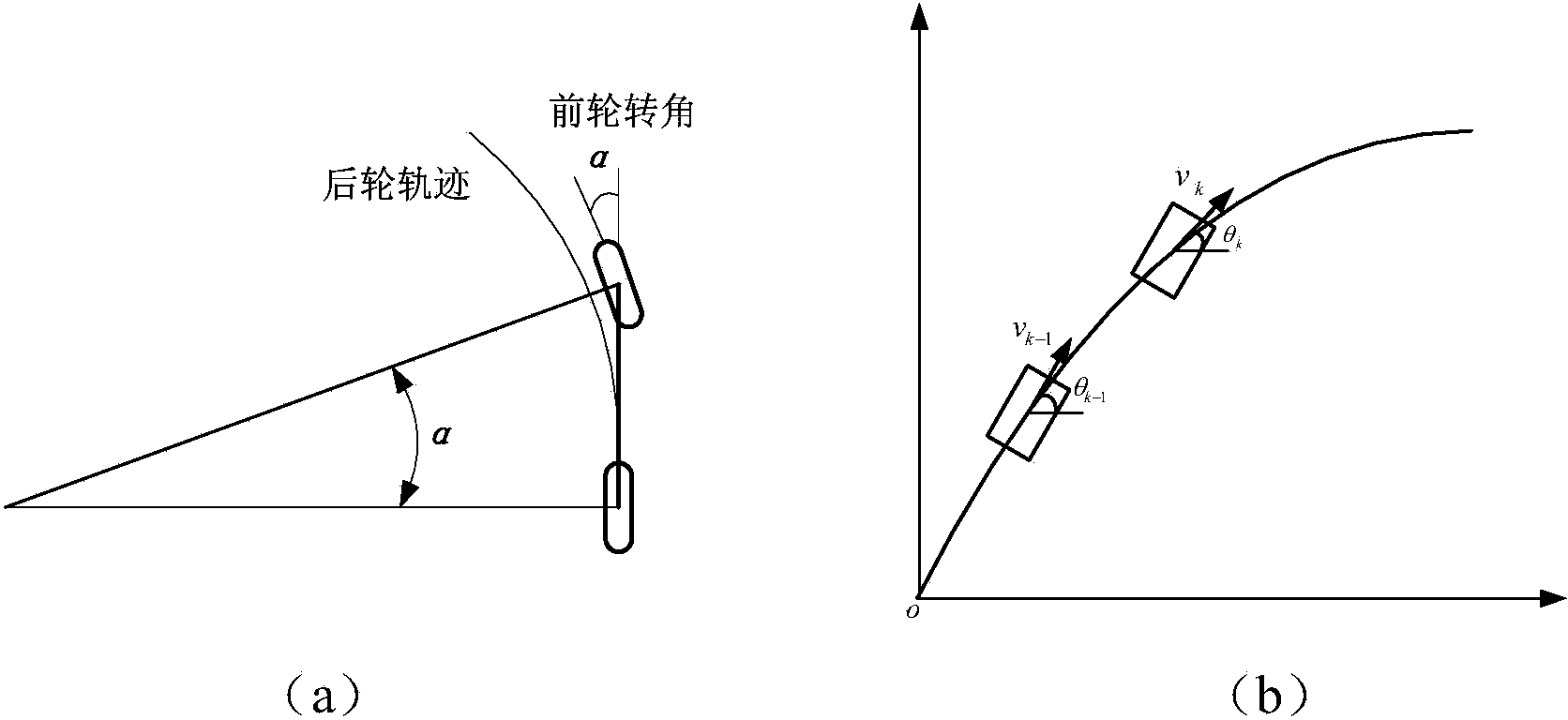
[0050] according to figure 2 (a), the real-time rear wheel speed (speed in the direction of vehicle movement) can be obtained: the speed sensor reads the speed informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More