

Strong tracking UKF filter method based on sampling point changing
A technology of sampling points and strong tracking, which is applied in the field of strong tracking filtering algorithm and improved strong tracking unscented Kalman filtering, which can solve the problems of filtering accuracy decline, non-local sampling, numerical instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail in combination with specific experiments. The specific examples described here are only used to explain the present invention, not to limit the present invention.
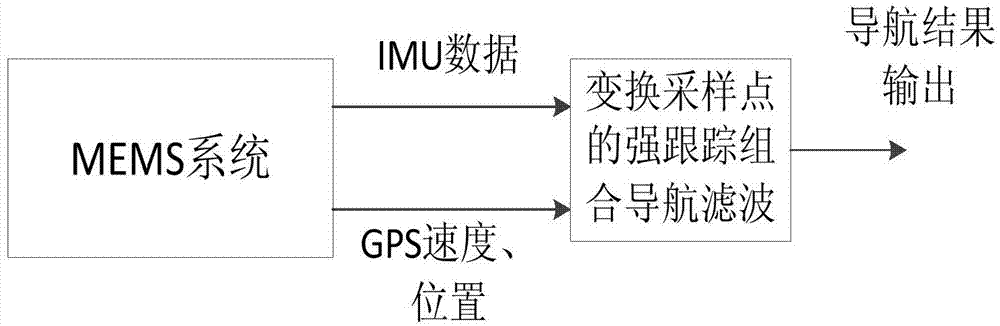
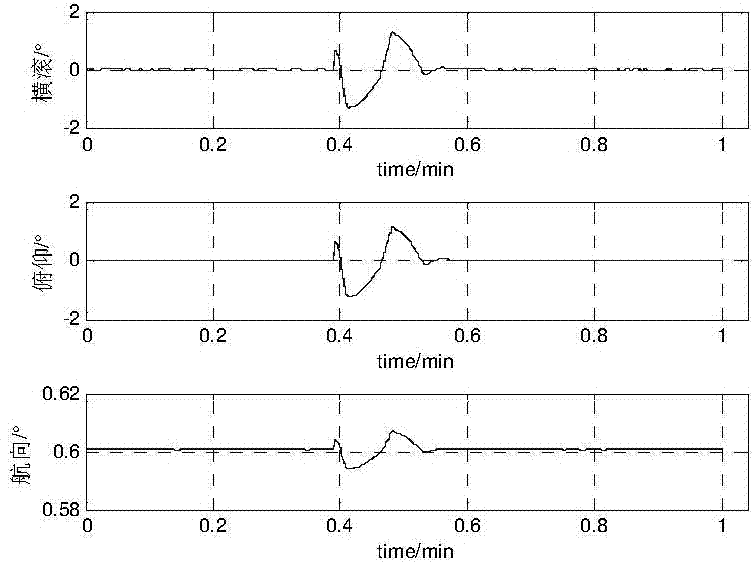
[0105] The data processed by the invention is the original output information of the MEMS / GPS integrated navigation system. During the experiment, the MEMS is fixedly connected to the locomotive, and the GPS antenna is placed so that it is within a good signal range to start the inertial navigation system. In order to achieve the best performance of MEMS, it is necessary to make the system move under the condition of a certain linear velocity after starting for a certain period of time, and then stop for measurement. During the measurement, an artificial perturbation is added to the system, and then it remains at rest.
[0106] The present invention ado...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More