

Stable vision-induced brain-computer interface-based robot control method
A steady-state visual evoked, brain-computer interface technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
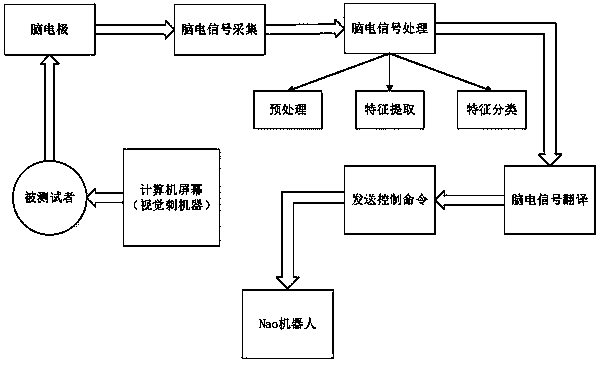
[0073] The method flow chart of this embodiment is as follows figure 1 As shown, it specifically includes the following steps:
[0074] 1. The subjects were required to have normal vision or normal vision after correction. Subjects were seated in a comfortable chair approximately 65 cm from the computer monitor. Place electrodes according to the international 10-20 system electrode placement standard. Brain electrodes were placed at P3, PZ, P4, PO3, POZ, PO4, O1, OZ, and O2 in the occipital area of the subject's head. The ear was used as the reference electrode, the ground electrode was grounded, and conductive paste was injected into the subject's brain electrode. , the purpose is to ensure that the electrode impedance remains below 5kΩ, so that the experiment is more accurate.
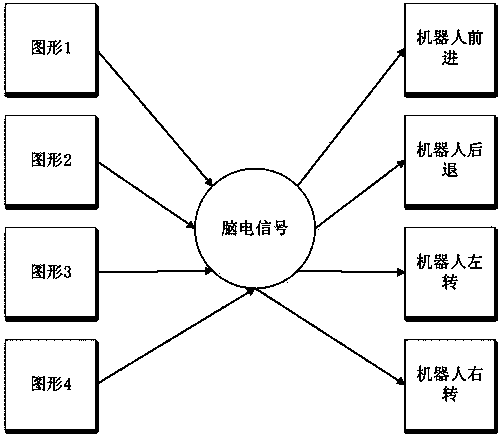
[0075] 2. Presentation of stimulus paradigm. Use the Psyc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More