

Fuzzy estimation method for initial article grabbing reference force of hand prosthesis
A prosthetic hand, technology of reference force, applied in the direction of prosthesis, medical science, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
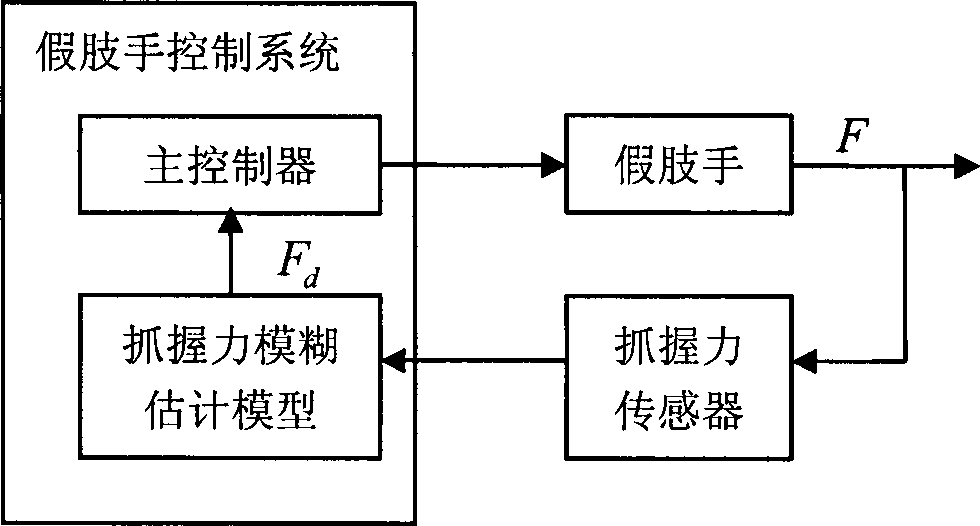
[0048] After the design of the prosthetic hand is completed, the structure and stiffness are determined, and the intention of the human brain cannot be completely decoded, so the prosthetic hand cannot grasp objects with variable stiffness like a human hand. Therefore, active control is used to realize the function of the prosthetic hand to grasp objects with different stiffnesses. Based on the control principle of human hand grasping, a prosthetic hand grasping control strategy is proposed, such as figure 1 Shown, where F is the grip force of the prosthetic hand, F d for the desired grip. According to the measurement information of the grasping force, the grasping force estimation of human brain vision is replaced by the fuzzy estimation model of grasping force, and the neural control of the human brain is replaced by the fuzzy controller, so that the prosthetic ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More