

Driving device for self-adaptive bionic hand
A driving device, bionic hand technology, applied in the directions of manipulators, artificial arms, chucks, etc., can solve the problems of unable to adjust fingers in time, poor adaptive ability of fingers, unable to achieve precise grasping, etc., to achieve rich grasping posture, comfortable experience Sense, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
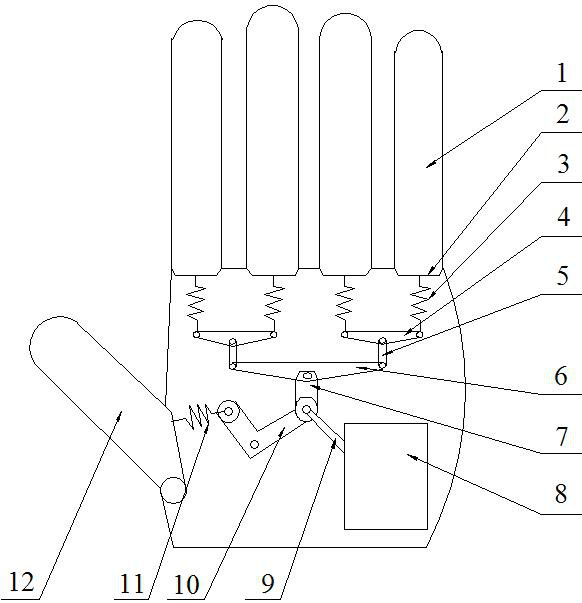
[0022] Embodiment one, such as figure 1 As shown, the linkage mechanism includes a control rod 10 and a control unit that are movably connected to the driving arm 9. The control rod 10 is connected to the knuckle 2 of the thumb 12 through the second spring 11, and the driving arm 9 of the driving machine 8 moves in sequence. The control rod 10 is driven to move, and under the action of the control rod 10, the thumb 12 can smoothly realize bending and stretching. Due to the buffering effect of the second spring 11, the bending and stretching of the thumb 12 has a certain degree of flexibility, so that the thumb 12 has a certain degree of self-adaptive ability, which facilitates the smooth realization of grasping objects.
[0023] The control unit is connected to the knuckle 2 of the finger 1 through the first spring 3, and the control unit includes an active rod 7 that is movably connected with the driving arm 9, a crossbar 6 that is movably connected with the active rod 7, and...
Embodiment 2
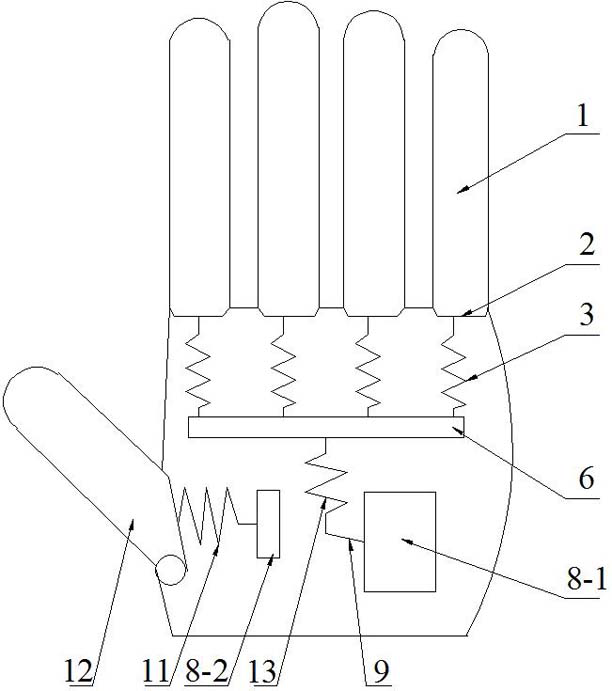
[0025] Embodiment two: if figure 2 As shown, the driving machine 8 includes a first driving machine 8-1 and a second driving machine 8-2, and the driving arm 9 of the first driving machine 8-1 is connected with the cross bar 6 through the third spring 13, so Said crossbar 6 is respectively connected with the knuckles 2 of the four fingers 1 of the bionic hand through the first spring 3 in turn, and under the action of the first driving machine 8-1, the four fingers 1 of the bionic hand can move simultaneously to complete the finger joints 1 of the bionic hand. Under the action of the first spring 3 and the third spring 13, the finger 1 has a certain adaptive ability, so that the degree of bending, stretching and rotation of the finger 1 closely matches the shape of the grasped object.
[0026] The driving arm 9 of the second driving machine 8 - 2 is connected with the knuckle 2 of the thumb 12 through the second spring 11 . Using the second driving machine 8-2 to separately ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More