

Method for controlling four-propeller thruster of underwater robot
A propeller propeller and underwater robot technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve problems such as difficult to establish mathematical models, improve control accuracy and control efficiency, and improve flexibility and efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
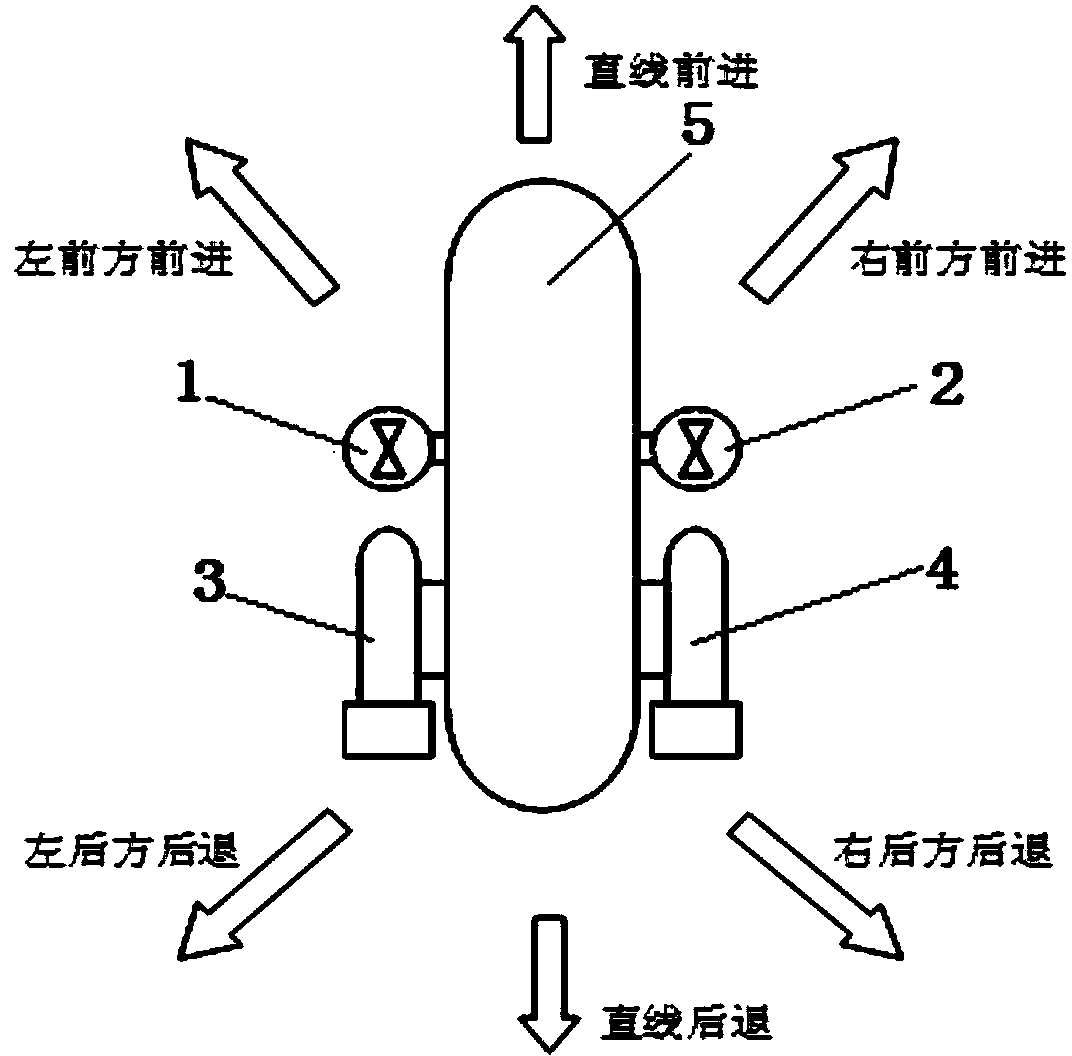
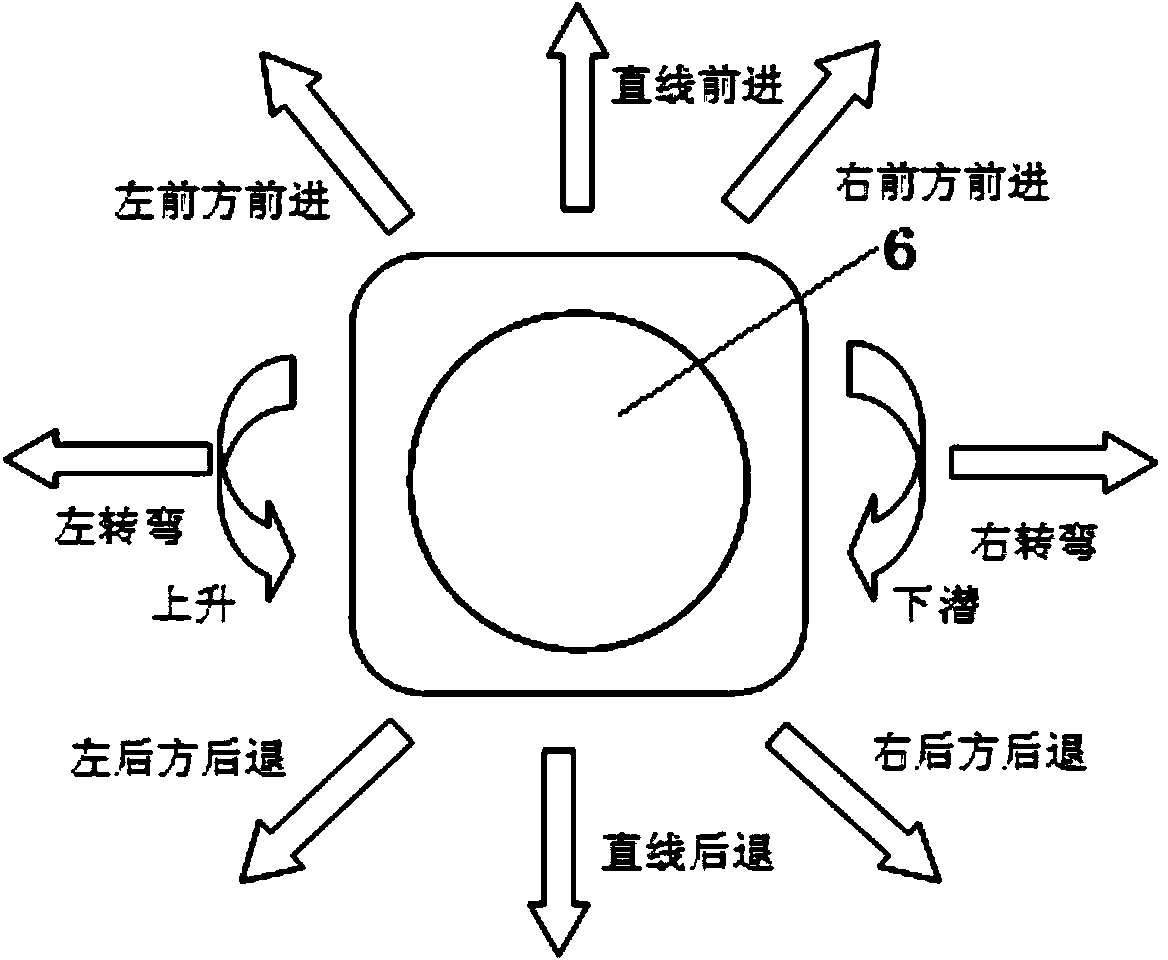
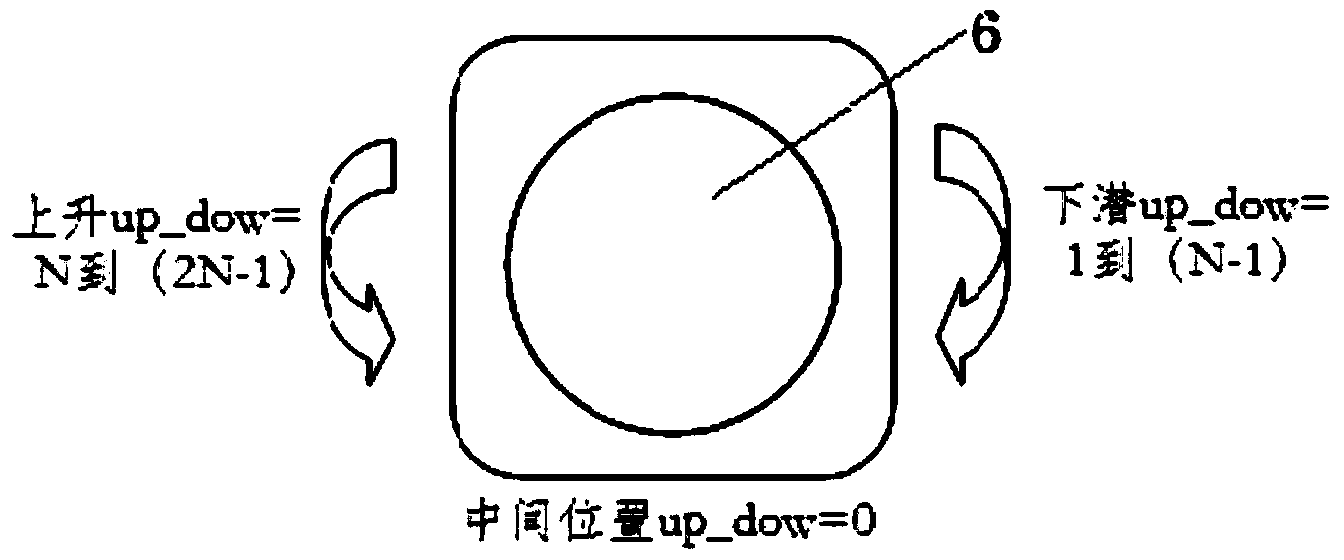
[0024] Depend on Figure 1-5As shown, the present invention provides a control method for four-propeller propellers of an underwater robot, and the underwater robot 5 includes a left horizontal thruster 3, a right horizontal thruster 4, a left vertical thruster 1, and a right vertical thruster 2, each The thruster consists of a motor and a propeller. The four propellers adopt one type of motor, but two pairs of propellers are used, one pair is used for the horizontal propeller, and one pair is used for the vertical propeller, wherein each pair of propellers is installed in the same direction, but the directions of the blades are opposite. The upper computer controls the movement mode of the underwater robot 5 by operating the three-dimensional joystick 6 . The horizontal thruster provides horizontal propulsion power, and the vertical thruster provides rising and diving power. When the underwater robot 5 is horizontally propelled forward, the two motors that provide power for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More