

Parallel and matching precision constrained splicing method for consecutive frames of multi-feature-point unmanned aerial vehicle reconnaissance images
A technology with precision constraints and feature points, applied in image enhancement, image analysis, image data processing and other directions, it can solve the problems of difficulty in real-time image processing, not fully achieving real-time processing, and not much improvement in image stitching speed. Excellent stitching effect, accurate registration, and the effect of improving processing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0064] In this example, a 4-core computer is used to test 88 frames of UAV remote sensing images. The test process and results are as follows:
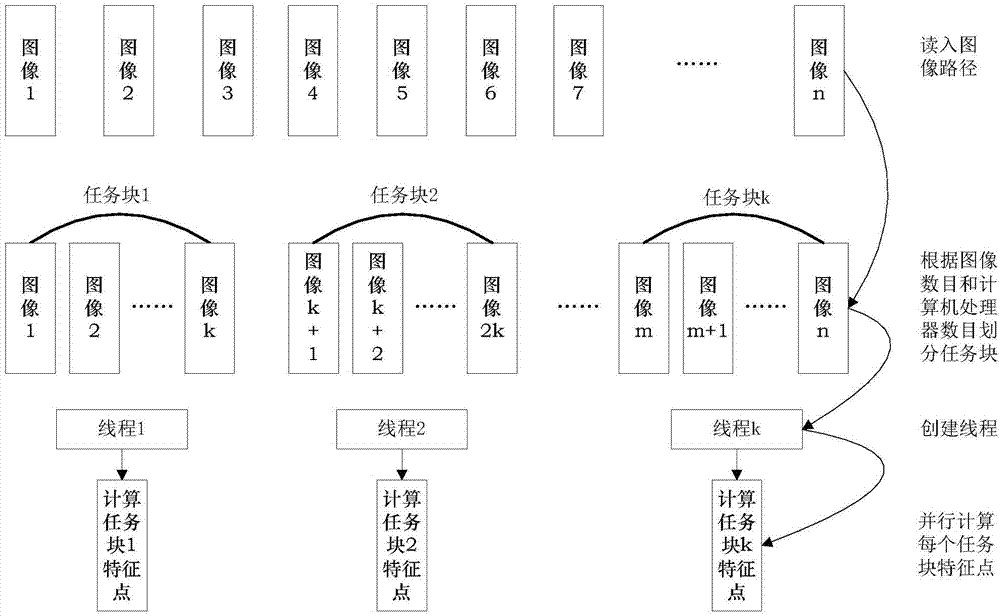
[0065] The first step: assign task blocks, create threads, and extract image SIFT feature points.
[0066] 1) Read in the storage path of the images to be spliced, and count the number n=88 of the images to be spliced;
[0067] 2) According to the number of images n and the number of processor cores k=4, divide the images to be spliced into blocks, that is, divide the images to be processed into k groups on average. Ideally, the number of images in each group should be equal, which is n / k images.
[0068] 3) Create threads according to the number of assigned task blocks. The created k threads work in parallel at the same time, and are used to extract the feature points of the images in the corresponding task blocks. The feature points of two single images are as follows: Figure 4a , 4b shown.
[0069] During the test, 1, 2, 4,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More